Excavator operating radius. Basic operating parameters of single-bucket excavators. Complying with safety regulations before starting to work on an excavator
The smallest digging radius at a given depth (Ri) is determined depending on the development depth, position and angle of repose.
The greatest digging depth (Hk) is set to the level of the bucket teeth at the greatest tilt of the boom and depends on the amount of movement (a). The shallower the digging depth, the longer the travel length can be.
The radius of unloading of the bucket (Rp) is the distance from the axis of the excavator to the teeth of the bucket at the required height at the moment when it begins to pour out of it. For mechanical excavators with a bucket rigidly connected to the handle, unloading occurs when the handle is turned from the initial to the final unloading radius, and the location of the blade or vehicle body must be taken into account. For hydraulic excavators, bucket unloading is not related to the position of the boom and arm.
Bucket unloading height (hp) is a value that depends on Rp and the height of the vehicle body (or dump), taking into account the margin between them and the bottom point of the bucket at the time of unloading, equal to 0.1 m.
An excavator with dragline working equipment is used to develop soils of groups I-VI below the standing level when digging pits, trenches, canals, constructing embankments from reserves, extracting sand and gravel from under water with loading the soil into vehicles and working outwards (Fig. 4.5, G). The dragline bucket is suspended on two ropes (lifting and traction). The traction rope is used to move the bucket (drawing) when collecting soil, and the lifting rope is used to lift the bucket. The raised bucket is held in a horizontal position (inclination 10... 15° to the horizon towards the rear wall) by a traction rope. At the unloading site, the traction rope weakens and the bucket tips over.
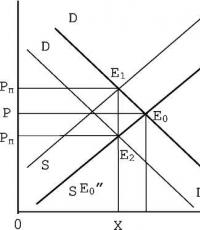
Let's consider the main technological parameters of the dragline (Fig. 4.5, d). The radius of the overall installation (R0) is determined in the same way as for forward and reverse shovels.
The smallest digging radius at the parking level: R1 = Z0 + y/tg0 (assumed not less than Ro + 1m).
The largest dripping radius at the parking level: R2 = Rp + Hgtgβ.
The distance Hгtgβ is called the bucket throw value. The angle P is almost 7° on average.
The smallest digging radius at the level of the excavation bottom (R3) depends on the digging depth and on the position and magnitude of the excavation slope: R3 = R1 – H3/tg0.
The largest digging radius at the level of the bottom of the excavation (R4) depends on the position and length of the boom, as well as on the amount of cast:
R4 = R2 + 0.123H3.
The greatest working depth (Hmax) is the distance from the excavator parking level to the teeth of the bucket thrown down, with full use of the lengths of the traction and lifting ropes. Taking into account the need for horizontal movement of the bucket along the bottom of the excavation to move the excavator, the greatest development depth is calculated with the smallest amount of movement (for example, 1 m).
The smallest development depth (Hmin) is the depth at which a slope of length lн is formed, ensuring normal filling of the bucket with soil:
The angle of repose 6 depends on the soil group according to the labor intensity of development: for group I 9 = 45°, for groups II-III 0 = 38°, for groups IV-V 6 = 33°, for group VI 6 = 29°.
The length of the advance (a) depends on the mining method (the width of the excavation and the location of the excavator) and the depth of the excavation. It should be such that from the new parking lot the excavator can excavate the most remote areas of the slope.
An excavator with working equipment, a grab, is used to develop soils of groups I-III, located below or above the level of the machine, when digging deep pits with vertical walls, trenches, extracting sand and gravel from under water, loading and unloading bulk materials, supplying soil during backfilling of trenches and pits. The grab is used on excavators with mechanical and hydraulic drive. In the first version, it is suspended on ropes to the dragline boom or, in the second, it has a flexible or rigid suspension to the handle. A grab with a rigid suspension consists of a stand with a cylinder and bucket jaws. Let's consider the main technological parameters of an excavator equipped with a grab (Fig. 4.5, f).
The radius of the overall installation of an excavator with a grab (Ro) is determined in the same way as for the excavators discussed above.
The smallest digging radius at the parking level (R1) depends on the maximum rotation angles of the boom and arm, as well as on the size of the grab bucket.
The largest digging radius at the parking level (R2) also depends on the linear dimensions of the elements of the working equipment.
The development depth (H3) for mechanically driven excavators is determined by the length of the lifting rope and the angle of inclination of the boom. For hydraulic excavators, the bucket is lowered when the boom is tilted and H3 mainly depends on the length of the stand and the working stroke of the hydraulic cylinder rod. Practically for mechanical excavators H3< 6 м, для гидравлических- H3<10 м.
8.1.1 It is advisable to excavate pits and structures with a large volume of soil moved to dumps using backhoe excavators, and if they are significant in depth, also with draglines.
8.1.2 The movement pattern and dimensions of the faces are influenced by the dimensions of the pit and the main operating parameters of the excavator (Figure 8.1): optimal digging (cutting) radius R 0 , amounting to 0.8...0.9 of the largest digging radius R max ; maximum possible height and digging depth ±H max ; the largest radius and height of soil unloading. These parameters are indicated in the ENiR E2-1 collection and other reference books on construction machines.
8.1.3 The soil is first developed for movement, as a rule, in the middle part (zone) of the pit (with penetrations parallel to the long side of the pit) using frontal faces - up to 1.7R 0 wide or widened frontal - up to 2R 0 wide, with movement along a zigzag (Figure 8.2). If the width of this part is more than 2R 0, it is advisable to provide a series of parallel penetrations along the long side: the first using the frontal face and subsequent ones using the side faces. The developed soil is moved by dump trucks or bulldozers to a special map (see subsection 5.2).
8.1.4 Then the soil is developed using side faces into dumps located along the long sides of the pit so as not to interfere with subsequent work. The soil from the “shortfall” is also sent to dumps.
8.1.5 The thickness of the “undercut” (Table 8.1) when excavating soil with hydraulically driven excavators can be taken h weeks= = 0.05...0.1* m. The volume of “shortage”, m 3, for a rectangular pit in plan can be determined by the formula
V weeks =A ∙ B ∙ h weeks, (8.1)
Where A And B– respectively, the width and length of the pit along the bottom, m.
Table 8.1 – Permissible amount of soil shortage
8.1.6 The width of the development zones in dumps along the top and bottom of the above pit is determined by the formula (see Figure 8.2)
Ш о = (V сп–V weeks)/[ N zo (H to– h week) l zo ], (8.2)
Where V salary– volume of backfilling of the foundation sinuses (see table 4.1), m 3 ;
____________________________
*With special control and automation equipment (infrared emitters, etc.)
N zo– the number of pit zones developed into dumps, and the number of dumps. With a rectangular pit N zo= 2;
l zo– the length of the pit zones developed into dumps and the estimated length of the dumps themselves, defined as the arithmetic mean between the lengths of the pit at the bottom ( B) and on top ( B in), m;
H to– pit depth, m.
8.1.7 Width of the excavation zone(s) with soil development for movement on top SH TV, influencing the movement pattern of the excavator (see Figure 8.2), are determined by the formula
W TV = A in–2Sh o. (8.3)
8.1.8 Soil dumps with a slope slope of 1:m 0 = 1:1 should be located no closer than 1 m from the edge of the pit (the berm should be as wide as Sh b, not less than 1 m). Height of dumps h o(given that h o≤ ) can be determined by the formula
![]() , (8.4)
, (8.4)
Where K r– coefficient of initial soil loosening (see table 3.2);
, – see in formula (8.2).
8.2 Selecting a backhoe excavator model
8.2.1 We recommend choosing excavator models with a hydraulic drive and a maximum digging depth greater than the depth of the pits by 0.5...1 m for cohesive soils and 1...1.5 m for non-cohesive soils and taking into account the maximum fillability of the buckets (see Table 5.1 ). In this case, the specifications for selected excavators should be indicated in terms of bucket capacity, characteristics of booms and handles.
8.2.2 The final choice of model is made after checking the possibility of working “in dumps” in the side face according to the main conditions:
Opportunities to cover the most remote points in the development area from one parking lot ( S) and unloading into a dump ( T), according to Figure 8.3;
Safety of work at the edge of the slope.
8.2.3 The possibility of covering the extreme points of the face with a dump can be determined graphically or using the formula
Where b 1 And b 2– the maximum permissible distances from the axis of the excavator's penetration to the cutting points (S) and dumping (T) of the soil (the axis of the penetration along the berm is shown conditionally);
IN– slope position, m. IN= (H to– h weeks)m 0;
Sh o– see formula (8.2);
Sh b– see clause 8.1.8;
b o– blade width, m. b o= 2 h o(see clause 8.1.8).
Largest values b 1 And b 2 determined by formulas
![]() ; (8.6)
; (8.6)
![]() , (8.7)
, (8.7)
Where Rn– the largest digging radius at the level of the slope base, m;
l lane– the length of the working movement of the excavator, which can be taken according to Table 8.2, m;
R in– the largest unloading radius at the corresponding height, m.
8.2.4 In the absence of graphs of the trajectory of the cutting edge of the bucket of a certain model of “backhoe”, with a sufficient degree of accuracy Rn can be determined using the graph in Figure 8.4. To do this, calculate the ratio of the excavation depth ( N to) to the maximum depth of soil digging by an excavator of the selected design and from it determine the ratio R n /R max = N n
R n = R max ∙ N n. (8.8)
For example, with a pit depth N to=2 m, when planning to use the E-5015 excavator with a bucket capacity of 0.5 m 3 ( -H max= 4.5 and Rmax= =7.3 m) the results of the determinations are as follows:
![]() = 2/4.5 = 0.44. Then the interval Nn= 0.88...0.94. We accept with a guarantee Nn= 0.88, at which Rn= 7.3 ∙ 0.88 = 6.24 m.
= 2/4.5 = 0.44. Then the interval Nn= 0.88...0.94. We accept with a guarantee Nn= 0.88, at which Rn= 7.3 ∙ 0.88 = 6.24 m.
8.2.5 Similarly, with a sufficient degree of accuracy it is possible to determine R in using the graph in Figure 8.5*. To do this, calculate the ratio of the required unloading height ( N in) To Rmax and use it to determine the relationship N in /R max =N in, corresponding to the above condition. Then
N in =R max∙ N in . (8.9)
For example, with the required unloading height according to the height of the dump N in= 2.2 m (excavator E-5015 with = 3.9 m), the results of the determinations are as follows: N in/ Rmax= 2.2/7.3 = 0.30. Interval N in= 0.67...0.71. Then, taking into account the capacity of the bucket is less than 1 m 3, we accept with a guarantee N in = 0,67,
____________________________
*The graphs in Figures 8.4 and 8.5 are based on data from eight versions of excavators: PC200-7 and ZX200 made in Japan; EK220-06, EK270-05 and EK400-05 made in Russia.
at which R in= 7.3 ∙ 0.67 = 4.89 m.*
8.2.6 Operational safety is ensured under the condition
b 1 ≥ B + 1 + B o K o, (8.10)
Where B– see in formula (8.5);
B o– width of the excavator support contour, m, ranging from 2.5...2.9 m to 3.0...3.9 m for excavators with a bucket capacity, respectively, from 0.4...1.0 m 3 to 1.25... 2.5 m3;
K o– coefficient taking into account the position of the edge of the slope relative to the extreme point of support – Q; K o= 0,5…0,7. **
8.2.7 A significant excess of the left side of formula (8.5) over the right allows soil to be unloaded over a larger radius R in ’(instead of R in) exactly T"(instead of T), reducing the angle of rotation of the excavator platform, or shifting the axis of its path (see Figure 8.3).
8.2.8 The cross-section of the part of the pit, the soil from which is intended to be moved to the embankment map, first by the frontal and then by the lateral face(s), is shown in Figure 8.6. The boundaries of the faces (penetrations) are determined by the operating parameters of the excavator.
8.2.9 Distance b 1 determined by formula (8.6) subject to the conditions of formula (8.10), and b 3 in CP you can take up to 0.85 R0. The location of the dump truck must meet the following conditions:
The center of the body should be located along an arc of radius no more than R in;
Between the circle described by the tail of the excavator,
and the protruding parts of the dump truck must be at least 1 m wide;
Like an excavator, a dump truck must move and be installed at a distance of no closer than 1 m from the edges of excavations (outside the soil collapse prism).

1- axis of the first excavator penetration;
2 - the same, subsequent ones;
3 - lines of penetration contours.
Figure 8.6 – Scheme for determining the dimensions of side faces when excavating soil for movement
____________________________
* When loading soil into a dump truck, the unloading height must be at least 0.5...1 m above the side of the body.
** For pneumatic wheeled excavators, K o ≥ 0.7 should be taken, taking into account the location of the outriggers.

1, 2 – lines of boundaries of maximum values R n / R max .
Figure 8.4 – Graph for determining the radius of cutting soil with backhoe excavators at the bottom of slopes, R n

1, 1a – lines of boundaries of the maximum values of R in / R max for excavators with a bucket capacity of 0.8...1 m 3 (R max = 8.8...10.0 m); 2, 2a - the same, for excavators with a bucket capacity of 1.2...1.9 m 3 (10.0..11.9 m).
Figure 8.5 – Graph for determining the radius of soil unloading with backhoe excavators, R in
Related information.
Most single-bucket construction excavators are universal machines that can be equipped with various types of interchangeable working equipment. Depending on the type of drive of the working body, excavators are divided into cable and hydraulic. Currently, hydraulic excavators are most commonly used.
The use of replaceable working equipment makes it possible to mechanize processes such as: cleaning the bottom of excavations; crushing and removal of oversized debris and boulders; finishing the surface of slopes of earthen structures, the bottom of excavations; layer-by-layer compaction of soil in cramped conditions, when installing backfills; loosening frozen and difficult-to-develop soil.
Construction excavators produced on caterpillar and pneumatic wheels. The most common types of working equipment are straight shovels, backhoes, draglines and grabs.
Methods for developing soil with single-bucket excavators are determined mainly by the type of replaceable working equipment used on them. The choice of method depends on the size and volume of earthen structures, soil properties, the presence of groundwater, permafrost, etc.
When developing wide pits When loading soil into vehicles (for example, during the construction of settling tanks, filters, reservoirs, aeration tanks, etc.), excavators equipped with a straight shovel are more often used. A backhoe is used to develop trenches, small pits with loading soil into vehicles or into a dump. Dragline is used to develop pits, trenches and channels, construct embankments from reserve soil, and grab- for developing deep pits with vertical walls or supplying soil when filling cavities.
The space in which the excavator is located and soil is excavated is called the face. Its shape and dimensions depend on the operating parameters of the excavator and the adopted soil development scheme (Fig. 4.16).
Excavator with straight shovel moves along the bottom of the excavation, digs “from itself” from bottom to top, loading the excavated soil onto vehicles. The most commonly used are excavators with buckets with a capacity of 0.4 ... 2.5 m 3. The capacity of the bucket is selected depending on the volume of work, the depth of the pit and the characteristics of the soil. To fill the bucket as completely as possible, the face height must be at least three times the height of the bucket. Excavators with a straight shovel work most efficiently in dry faces, and in wet faces (with high groundwater levels) it is necessary to use drainage or dewatering.
A recess formed by one stroke of an excavator is called a tunnel. Depending on the nature of soil development, penetrations can be frontal (end) and lateral. During frontal excavation, the excavator moves along the axis of the excavation and develops the soil in front of itself and on both sides of the axis, and during lateral excavation, on one side in the direction of movement. The nature of the excavation depends on the depth and width of the pit and the conditions of its development. Frontal excavations are used to develop excavations on steep slopes or when the depth of the excavation does not allow loading vehicles located on the excavation berm.
Narrow pits (up to 1.5R wide) are developed by frontal excavation with one-sided loading into vehicles (Fig. 4.16, a), with a pit width from 1.5R to 1.9R, development is carried out by frontal excavation with two-way loading of vehicles (Fig. 4.16, b). The largest width of the frontal penetration at the top for an excavator with a straight shovel when moving in a straight line is determined by the formula
where R 0 is the optimal cutting radius of the excavator, taken equal to 0.8 to 0.9 of the maximum cutting radius, m; l n is the length of the working movement of the excavator, taken to be 0.75 of the length of the excavator handle, m.
Pits with a width of 1.9R to 2.5R are developed using a widened frontal tunnel with the excavator moving in a zigzag (Fig. 4.16, c), and up to 3R - with its movement across the pit (Fig. 4.16, d), i.e. cross-end penetration. Wide pits (more than 3.5R) are developed first by frontal excavations, then by side penetrations. The maximum width of the penetration is equal to:
for zigzag
for cross-end
for side
Rice. 4.16 - Drilling diagrams for a single-bucket excavator
a - d - with a straight shovel, e - m - with a backhoe, l - in a trench, m - work of a dragline excavator
where R c is the cutting radius at the parking level; n-number of lateral movements of the excavator; m - slope coefficient; H - face height.
When the excavation depth exceeds the optimal face height, the soil is developed in tiers (ledges) in the sequence determined by the excavation profile.
Soil developmentexcavators with backhoe carried out by end or side passages with the excavator moving along the top of the face “towards itself” and digging the soil below the level of its parking (see Fig. 4.16, f - j). The last feature is important in cases where the soils are moist or wet. It is also possible to mine soil from under water. At the same time, depending on the width of the pits, soil development is carried out with straight, zigzag frontal, transverse end and lateral penetration.
The width of the frontal penetration along the top with one-sided unloading of soil is:
where R max is the largest cutting radius, m;
l n - length of working movement of the excavator, m; for a dragline excavator it is assumed to be equal to 1/5 of the boom radius;
R T - the largest radius of unloading soil into transport;
b k - width of vehicles or soil dump.
For double-sided unloading of soil, m:
Bottom penetration width, m:
where m is the slope coefficient;
H - face height, m.
The width of the frontal widened zigzag penetration, at 1.7R≤ B ≤3R is determined by the formula:
The width of the front widened transverse penetration, at 3R≤B ≤3.5R is determined by the formula:
When B ≥ 3.5, after the first frontal penetration, further development is continued with one or more side penetrations. The width of each side penetration is, m:
where R n is the cutting radius along the bottom of the pit.
Developed soil Usually they are poured into a dump on the edge and partially (excess unnecessary for backfilling) for transport. The width of the passage when loading soil into vehicles is taken to be (1.2 ... 1.3) R, and when dumping it into a dump - (0.7 ... 0.8) R, since it limits the capacity of the shaft . When excavating trenches, it is recommended to begin soil development from the side of the slope towards the middle of the trench, which reduces the cutting resistance of the soil. Trenches with a bottom width of up to 1 m are developed in one penetration (end) with the excavator moving along the axis of the trench.
Dragline excavators , having an elongated boom and a bucket freely suspended on a cable, develop soil and dump it into a dump or onto vehicles when constructing deep pits, channels, trenches. The development of the soil is carried out below the level of the ex-cavator’s parking lot, with him working “for himself”; the bucket is filled in the process of dragging it along the ground (Fig. 4.16, m, l; Fig. 4.17). Wide excavations are developed in several frontal penetrations or technological methods such as zigzag movement or cross-end penetration, as well as the shuttle method of operating an excavator, are used. When constructing wide pits, as well as embankments from reserve soil, in some cases, a side penetration is used, the width of which is about (0.7 ... 0.8) R, and the rotation of the excavator boom for unloading is 180°.
Rice. 4.17 - Schemes of operation of an excavator with a “backhoe”
a - frontal excavation of an excavator when loading soil into a vehicle supplied along the bottom of the face, b - the same, supplied at the excavator parking level and into a temporary dump, c - lateral penetration; 1 - excavator, 2 - dump truck, 3 - direction of transport, 4 - dump
Excavator with grab bucket with a capacity of 0.3 ... 4 m 3, freely suspended on a cable, excavations are developed within a radius of 8 ... 24 m at a depth of 7 ... 15 m when lifting the grab to a height of 6 ... 14 m. Light soils are usually developed Groups I and II, and heavier ones - with their preliminary loosening. Such excavators are used to develop deep excavations with vertical walls, for example, when installing water intake wells, buried pumping stations, anti-seepage curtains, etc.
The technical term is used in the construction and mining industries when we are talking about the operation of heavy equipment in the development of quarries, pits of buildings, and structures. The face of an excavator is a production site within the boundaries of which soil moves.
Depending on the scale of work and the technological map, the type and power of the machine are selected. It is economically feasible to order an excavator rental (http://www.mtarenda.ru/arenda_ekskavatora) according to technical requirements. Low-capacity equipment is cheaper, but will increase the time required to work on site. In addition, excessive loads will damage components and assemblies of working equipment.
Types of excavators
The bucket is the main part of the excavator. Rock mining equipment is equipped with one or more buckets. A single-bucket machine moves earth when the axle platform rotates. There are the following types of single-bucket excavators:
- dragline;
- straight;
- backhoe.
Depending on the direction of movement of the boom, the equipment is equipped with a forward or backhoe. The bucket is rigidly fixed to the handle of the machine, the soil is unloaded into the dump and into vehicles. Models are equipped with a mechanical or hydraulic drive. The dragline is equipped with a bucket on a flexible cable suspension. The boom reach of a self-propelled machine reaches 120 meters, and the bucket capacity is up to 4–120 m3. A dragline is used to move loose soil from a site located above or below the parking level.
In a rotary and chain multi-bucket machine, the working equipment moves along a circular path. The productivity of a walking rotary excavator is 800–10,000 m3/hour. Differences in the design of working equipment affect the development technology, area and shape of the pit.
Types of faces
Chain bucket excavators produce rock in the frontal face. Powerful equipment, moving around the site, cuts dense soils with buckets and removes them to the dump. They use equipment in the construction of canals, trenches, and for opening quarries.
Face mining is performed by rotary excavators, draglines, and mechanically driven shovels. As a result of the activity of mining equipment, a pit shape characteristic of open-pit coal mining is obtained. Development takes place from a plane located below the excavator horizon.
Difficult slaughter, with soils of varying densities, is carried out with ledges. Loosening equipment is placed in the upper part, and excavators in the lower parts of the quarry. When designing a stepped face, the bench height is calculated based on the fillability of the bucket, equipment performance and the creation of safe working conditions.
During development, the rock overhangs the lower tiers. The stability of the canopy depends on the type of rock and its ability to crumble. The face parameters are calculated values and are in direct relationship with technology, soil properties, and development methods.

For excavators equipped with a straight shovel, frontal or lateral penetration is used. In this case, mining is carried out from the bottom of the excavation, and the bottom wall is located above the excavator parking level (Fig. 5).
For excavators equipped with a backhoe or a dragline type bucket, end or side penetrations are used (Fig. 6).
An excavator face is the site where the excavator is located, part of the excavator, part of the site where soil is unloaded for backfilling, and a site for parking vehicles where excess soil is removed. Excavator faces, respectively, can be frontal, end, or side.
In end and frontal driving, the axis of movement of the excavator coincides with the axis of the excavation. The excavator, moving from parking lot to parking lot, develops either the left or the right part of the tunnel. The angle between the extreme positions of the boom when cutting should not be more than 90 (optimally about 70). An increase in the angle between the extreme positions of the boom leads to a sharp decrease in the productivity of the machine, since a significant amount of excavation cycle time is spent on unproductive movement of the boom and bucket. The smaller the angle between the extreme positions of the boom, the higher the productivity, but also the smaller the penetration width.
The width of the normal frontal penetration at the top is determined from the expression:
Where  - working cutting radius of the excavator, m
- working cutting radius of the excavator, m
 - length of movement (or movement) of the excavator from parking lot to parking lot, m
- length of movement (or movement) of the excavator from parking lot to parking lot, m
The length of the advance is defined as the difference between the maximum and minimum cutting radii at the digging depth of the excavator:

In preliminary calculations, you can use the approximate values of the travel length from the following table.
Note: the movement length of an excavator equipped with a dragline bucket is assumed to be equal to 1/5 of the boom length.
A side face (lateral penetration) is formed when the excavator is displaced relative to the development axis. The magnitude of the displacement can be dictated, for example, by the need to unload soil directly into the cavalier, as shown in Figure 6a. Here, the volume of soil from the adopted side excavation is equal to the volume of backfill. Therefore, the soil from the rest of the pit, excavated by zigzag end excavation, is removed. The maximum width of the side penetration on one side of the axis is determined by the formula:


The width of each subsequent side penetration after the first is found from the expression:
 ,
,
Where  - largest cutting radius at the excavator parking level, m.
- largest cutting radius at the excavator parking level, m.
With lateral penetrations you can develop fairly wide pits, performing them sequentially, one after the other.
Frontal (and end) faces can be made of different widths: normal, with zigzag movement of the excavator (Fig. 6a) and with transverse movement of the excavator.
In general, when developing pits there may be several types of penetrations; their combination can be rationally assigned by the designer and depends on the size of the excavation and the layout of the excavated soil.