Extreme Project Management. Extreme automatic control systems. Methods for searching for extremum. Extreme project management requires rapid adaptation of the team to the unusual, constantly changing conditions in which they have to work.
Send your good work in the knowledge base is simple. Use the form below
Students, graduate students, young scientists who use the knowledge base in their studies and work will be very grateful to you.
Posted on http://www.allbest.ru/
1. Extreme control systems
Extreme control systems are those self-propelled guns in which one of the performance indicators must be kept at a maximum level (min or max).
A classic example of extreme control is the automatic frequency control system of a radio receiver.
Fig.1.1 - Amplitude-frequency response:
1.1 Statement of the problem of synthesis of extremal systems
Objects are described by equations:
An extreme characteristic drifts over time.
It is necessary to select a control action that would allow one to automatically find the extremum and keep the system at this point.
U: extr Y=Y o (1.2)
Fig.1.2 - Static extreme characteristic:
It is necessary to determine the control action that ensured the fulfillment of the property:
1.2 Extremum condition
A necessary condition for an extremum is the equality of the first partial derivatives to zero.
A sufficient condition for an extremum is the equality of the second partial derivatives to zero. When synthesizing an extremal system, it is necessary to estimate the gradient, but it is impossible to estimate the vector of second partial derivatives, and in practice, instead of a sufficient condition for an extremum, the relation is used:
Stages of synthesis of an extremal system:
Gradient estimation.
Organization of movement in accordance with the condition of movement towards an extremum.
Stabilization of the system at the extremum point.
Fig.1.3 - Functional diagram extreme system:
1.3 - Types of extreme characteristics
1) Unimodal extremal characteristic of the module type
Rice. 1.4 - Extreme characteristics of the module type:
2) Extreme characteristic of the parabola type
Rice. 1.5 - Extreme characteristic of the parabola type:
3) In the general case, the extremal characteristic can be described by an nth order parabola:
Y = k 1 |y-y o (t)| n + k 2 |y-y o (t)| n -1 + …+k n | y-y o (t)| + k n +1 (t).(1.9)
4) Vector-matrix representation:
Y = y T By(1.10)
1.4 Methods for estimating gradient
1.4.1 Method of dividing derivatives
Let's consider it on a unimodal characteristic, y is the output of the dynamic part of the system.
yR 1 , Y = Y(y,t)
Let's find the total derivative with respect to time:
With a slow drift, thus
Advantage: simplicity.
Disadvantage: at small 0, the gradient cannot be determined.
Differentiating filter.
Rice. 1.6 - Scheme for estimating the partial derivative:
1.4.2 Discrete gradient estimation
Rice. 1.7 - Scheme for discrete estimation of partial derivative:
1.4.3 Discrete gradient sign estimation
For a small sampling step, we replace:
1.4.4 Synchronous detection method
The synchronous detection method involves adding an additional low-amplitude, high-frequency sinusoidal signal to the input signal to an extreme object and separating the corresponding component from the output signal. Based on the phase relationship of these two signals, we can conclude the sign of the partial derivatives.
Rice. 1.8 - Functional diagram for estimating the partial derivative:
Rice. 1.9 - Illustration of the passage of search oscillations to the system output:
y 1 is the operating point, and the phase difference of the signals is 0.
y 2 is the phase difference of the signals; a multiplying block can be used as a simplest FNC.
Rice. 1.10 - Illustration of the operation of the FNC:
A filter averaging over a period is selected as a filter, which allows one to obtain an output signal proportional to the value of the partial derivative.
Rice. 1.11 - Linearization of the static characteristic at the operating point:
Therefore, the equation of an extremal curve can be replaced by the equation of a straight line:
Signal at the output of the FNC:
k - coefficient of proportionality - tangent of the angle of inclination of the straight line.
Filter output signal:
Thus:
The synchronous detection method is suitable for determining not only one partial derivative, but also the gradient as a whole, with several oscillations of different frequencies being supplied to the input. The corresponding output filters highlight the response to a specific search signal.
1.4.5 Special gradient estimation filter
This method involves introducing a special dynamic system into the system, the intermediate signal of which is equal to the partial derivative.
Rice. 1.12 - Scheme of a special filter for estimating the partial derivative:
T - filter time constant:
A DF differentiating filter is used to estimate the total derivative of Y, and then this estimate of the total derivative is used to estimate the gradient.
1.5 Organization of movement towards an extremum
1.5.1 First order systems
We organize the control law proportionally to the gradient:
Let's write the equation of the closed system:
This is an ordinary differential equation that can be studied using TAU methods.
Consider the statics equation of the system:
If we ensure the stability of a closed-loop system using the gain k, then automatically in static conditions we will reach the extremum point.
In some cases, using the coefficient k, in addition to stability, it is possible to ensure a certain duration of the transition process in a closed system, i.e. ensure the specified time for reaching the extremum.
Where k is stability
Rice. 1.13 - Functional diagram of a first-order gradient extremal system:
This method is only suitable for unimodal systems, i.e. systems with one global extremum.
1.5.2 Heavy ball method
By analogy with a ball that rolls into a ravine and overshoots the points of local extrema, an AC system with oscillatory processes also overshoots local extrema. To ensure oscillatory processes, we introduce additional inertia into the first-order system.
Rice. 1.14 - Illustration of the “heavy” ball method:
Closed-loop equation;
Characteristic equation of the system:
The smaller d, the longer the transition process.
Analyzing the extreme characteristic, the necessary overshoot and duration of the transition process are set, from which the following are set:
1.5.3 Single channel systems general view
Control Law:
Substituting the control law into the control of the object, we obtain the equation of the closed system:
In the general case, to analyze the stability of a closed-loop system, it is necessary to use the second Lyapunov method, with the help of which the gain of the controller is determined. Because The 2nd Lyapunov method provides only a sufficient condition for stability, then the chosen Lyapunov function may turn out to be unsuccessful and a regular procedure for calculating the controller cannot be proposed here.
1.5.4 Systems with the highest derivative in control
General case of extremum of objects:
The functions f, B and g must satisfy the conditions for the existence and uniqueness of a solution to the differential equation. The function g - must be repeatedly differentiable.
C - matrix of derivatives
The synthesis problem is solvable if the product matrix is non-singular, i.e.
Analysis of the solvability conditions for the synthesis problem allows us to determine the derivative of the output variables, which clearly depends on the control action.
If condition (1.31) is satisfied, then such a derivative is the first derivative, and therefore the requirements for the behavior of a closed system can be formed in the form of a differential equation for y of the appropriate order.
Let's form a control law for a closed-loop system, for which we form a control law by substituting in the right side of the control for:
Closed-loop equation with respect to the output variable.
Let's consider the situation when
With the appropriate choice of gain, we obtain the desired equation and automatic access to the extremum.
The controller parameters are selected based on the same considerations as for conventional self-propelled guns, i.e. (SVK) i = (20*100), which allows us to provide the appropriate error.
Rice. 1.15 - Diagram of a system with the highest derivative in control:
In a system, a differentiating filter is introduced into the system to estimate the total time derivative, so it is convenient to use a gradient estimation filter to estimate gradients in such systems. Because Both of these filters have small time constants, then processes of different tempos can arise in the system, which can be identified using the method of separating movements, and slow movements will be described by equation (1.34), which corresponds to the desired at. Fast movements need to be analyzed for stability, and depending on the ratio of the time constant of the DF and the filter for estimating partial derivatives (PDE), the following types of movements can be distinguished:
1) The time constants of these filters are comparable.
The rapid movements describe the combined processes in these two filters.
2) The time constants differ by an order of magnitude.
In addition to slow movements, fast and ultra-fast movements corresponding to the smallest time constant are observed in the system.
Both cases must be analyzed for stability.
2. Optimal systems
Optimal systems are systems in which a given quality of work is achieved through maximum use of the capabilities of the object, in other words, these are systems in which the object operates at the limit of its capabilities. Let us consider a first-order aperiodic link.
For which it is necessary to ensure the minimum transition time y from the initial state y(0) to the final state y k . The transition function of such a system for K=1 looks like this:
Rice. 2.1 - Transition function of the system at U= const:
Let's consider the situation when we apply the maximum possible control action to the input of the object.
Rice. 2.2 - Transition function of the system at U=A= const:
t 1 - the minimum possible time of transition y from the zero state to the final state for a given object.
To obtain such a transition, there are two control laws:
The second law is more preferable and allows for control in the event of interference.
Rice. 2.3 - Block diagram of a system with a feedback control law:
2.2 Statement of the problem of synthesis of optimal systems
2.2.1 Mathematical model of the object
An object is described by state variables
Where the function f(x,u) is continuous, differentiable with respect to all arguments and satisfies the condition of existence and uniqueness of a solution to the differential equation.
This function is nonlinear but stationary. As special cases, the object can take the form of a nonlinear system with additive control:
Or a linear system
The object must be presented in one of the three forms presented above.
2.2.2 Multiple initial and final states
The problem of optimal transition from the initial state to the final state is a boundary value problem
Where the starting and ending points can be specified in one of four ways, shown in Fig. 2.4.
a) problem with fixed ends,
b) problem with a fixed first end (fixed starting point and set of final values),
c) a problem with a fixed right end,
d) problem with moving ends.
Fig. 2.4 - Phase portraits of the transition of the system from the initial state to the final state for various tasks:
For an object, the set of initial states can generally coincide with the entire set of states or the workspace, and the set of final states is a subspace of the set of states or the workspace.
Example 2.1 - Is it possible to transfer an object described by a system of equations to any point in state space?
Substituting the value U from the first equation into the second equation u = x 2 0 - 2x 1 0, we get -5x 1 0 + x 2 0 = 0;
We obtained a set of final states described by the equation x 2 0 = 5x 1 0 ;
Thus, the set of final states specified for an object (system) must be realizable.
2.2.3 State and control restrictions
Rice. 2.5 - General view of the state space working area:
A working area of the state space is allocated and specified. Typically, this area is described by its boundaries using modular conventions.
Fig.2.6 - View of the state space working area defined by modular conventions:
U is also specified - the range of permissible values of the control action. In practice, the region U is also specified using modular relations.
The problem of synthesizing an optimal controller is solved subject to control restrictions and a limited resource.
2.2.4 Optimality criterion
At this stage, the requirements for the quality of operation of the closed-loop system are specified. The requirements are specified in a generalized form, namely in the form of an integral functional, which is called the optimality criterion.
General view of the optimality criterion:
Particular types of optimality criterion:
1) optimality criterion, ensuring a minimum time of the transition process (the problem of optimal performance is solved):
2) optimality criterion that ensures minimum energy consumption:
For one of the components:
For all variable states:
For one control action:
For all control actions:
For all components (in the most general case):
2.2.5 Result form
It is necessary to stipulate in what form we will look for the control action.
There are two options optimal control: u 0 = u 0 (t), used in the absence of disturbance, u 0 = u 0 (x), optimal control in the form of feedback (closed-loop control).
Formulation of the problem of synthesizing an optimal system in general form:
For an object described by variable states with given restrictions and a set of initial and final states, it is necessary to find a control action that ensures the quality of processes in a closed system that corresponds to the optimality criterion.
2.3 Dynamic programming method
2.3.1 Optimality principle
Initial data:
It is necessary to find u 0:
Rice. 2.7 - Phase portrait of the system’s transition from the initial point to the final point in state space:
The trajectory of transition from the starting point to the final point will be optimal and unique.
Statement of the principle: The final section of an optimal trajectory is also an optimal trajectory. If the transition from the intermediate point to the final point were not carried out along an optimal trajectory, then it would be possible to find its own optimal trajectory for it. But in this case, the transition from the starting point to the final point would take place along a different trajectory, which should be optimal, but this is impossible, since there is only one optimal trajectory.
2.3.2 Bellman's basic equation
Let's consider a control object of arbitrary type:
Consider a transition in state space:
Rice. 2.8 - Phase portrait of the system’s transition from the starting point to the final point x(t) is the current (starting) point, x(t+Дt) is the intermediate point.
Let's transform the expression:
Let's replace the second integral with V(x(t+Дt)):
For a small value of Dt, we introduce the following assumptions:
2) Let's expand the auxiliary function
Carrying out further transformations, we get:
Where min V(x(t)) is the optimality criterion J.
As a result we got:
Let's divide both sides of the expression by Dt and eliminate Dt to zero:
We obtain the basic Bellman equation:
2.2.3 Calculation ratios of the dynamic programming method:
The basic Belman equation contains (m+1) unknown quantities, because U 0 R m , VR 1:
Having differentiated m times, we obtain a system of (m+1) equations.
For a limited range of objects, solving the resulting system of equations provides exact optimal control. This problem is called the AKOR problem (analytical design of optimal controllers).
Objects for which the AKOR task is considered must meet the following requirements:
The optimality criterion must be quadratic:
Example 2.2
For an object described by the equation:
It is necessary to ensure the transition from x(0) to x(T) according to the optimality criterion:
Having analyzed the object for stability, we obtain:
U 0 = U 2 = -6x.
2.4 Pontryagin's maximum principle
Let us introduce an extended state vector, which we expand due to the zero component, for which we choose the optimality criterion. zR n+1
We also introduce an extended vector of right-hand sides, which we expand using the function under the integral in the optimality criterion.
Let us introduce Ш - vector of conjugate coordinates:
Let us form the Hamiltonian, which is the scalar product of W and μ(z,u):
H(W,z,u) = W*t(z,u),(2.33)
Equation (2.34) is called the basic equation of the Pontryagin maximum principle, based on the dynamic programming equation. The optimal control is the one that delivers the Hamiltonian maximum over a given time interval. If the control resource were not limited, then necessary and sufficient extremum conditions could be used to determine optimal control. In a real situation, to find optimal control, it is necessary to analyze the value of the Hamiltonian at the limiting value of the level. In this case, U 0 will be a function of the extended state vector and the vector of conjugate coordinates u 0 = u 0 .
To find conjugate coordinates, it is necessary to solve the system of equations:
2.4.1 Procedure for calculating the system using the Pontryagin maximum principle.
The equations of the object must be brought to the standard form for the synthesis of optimal systems:
It is also necessary to specify the initial and final states and write down the optimality criterion.
The extended state vector is introduced
Extended vector of right sides:
And the vector of conjugate coordinates:
We write the Hamiltonian as a scalar product:
Finding the maximum of the Hamiltonian in u:
By which we determine the optimal control u 0 (Ш,z).
We write differential equations for the vector of conjugate coordinates:
We find the conjugate coordinates as a function of time:
6. Determine the final optimal control law:
As a rule, this method allows you to obtain a program control law.
Example 2.3 - For the object shown in Fig. 2. 9. it is necessary to ensure the transition from the starting point y(t) to the final point y(t) in T= 1c with the quality of the process:
Rice. 2.9 - Object model:
To determine the constants b 1 and b 2, it is necessary to solve a boundary value problem.
Let us write the equation of the closed system
Let's integrate:
Consider the end point t=T=1s., as x 1 (T)=1 and x 2 (T)=0:
1= 1/6 b 1 + 1/2 b 2
We obtained a system of equations from which we find b 2 = 6, b 1 = -12.
Let's write the control law u 0 = -12t + 6.
2.4.2 Optimal control problem
For a general object, it is necessary to ensure a transition from the starting point to the final point in the minimum time under a limited control law.
Features of the optimal performance problem
Performance Hamiltonian:
Control relay:
This feature occurs for relay objects.
Theorem on the number of switchings of the control action:
This theorem is valid for linear models with real roots of the characteristic equation.
Det (pI - A) =0 (2.51)
A(A) is a vector of real eigenvalues.
Statement of the theorem:
In the problem of optimal performance with real roots of the characteristic equation, the number of switchings cannot be greater than (n-1), where n is the order of the object, therefore, the number of control constancy intervals will not be greater than (n-1).
Rice. 2.10 - Type of control action at n=3:
Example 2.4 - Consider an example of solving the optimal performance problem:
Ш=[Ш 1 , Ш 2 ]
H b = W 1 x 2 + W 2 (-2dx 2 -x 1 +u)
When - the roots are real:
The sum of two exponents is:
If, then the roots are complex conjugate and the solution will be a periodic function. In a real system, there are no more than 5 - 6 switchings.
2.4.3 Switching surface method
This method allows you to find the control of state variable functions for the case when the optimal control is of a relay nature. Thus, this method can be used when solving problems of optimal performance for an object with additive control
The essence of the method is to identify points in the entire state space where the control sign changes and combine them into a common switching surface.
Switching surface
The control law will have the following form:
To form a switching surface, it is more convenient to consider the transition from an arbitrary starting point to the origin of coordinates
If the end point does not coincide with the origin, then it is necessary to select new variables for which this condition will be true.
We have an object of the form
We consider the transition, with the optimality criterion:
This criterion allows us to find a control law of this type:
With the unknown, the initial conditions are also unknown to us.
Considering the transition:
Reverse time method (reverse motion method).
This method allows you to determine the switching surfaces.
The essence of the method is that the starting and ending points are swapped, and instead of two sets of initial conditions, one remains for.
Each of these trajectories will be optimal. First, we find the points where the control changes sign and combine them into a surface, and then we change the direction of movement to the opposite.
Example - The transfer function of an object has the form:
Criterion for optimal performance:
Control restrictions.
Consider the transition:
Optimal control will have a relay nature:
Let's go to reverse time (i.e.). In reverse time the problem will look like this
Let's consider two cases:
We obtain the equations of the closed system:
Let us use the method of direct integration, we obtain a dependence on and since -, then we have
Because the starting and ending points are swapped, then we get similarly:
Let's build the result and use the phase plane method to determine the direction
Applying the direct integration method, we obtain:
The function will look like:
Changing direction:
Sign change point (switching point).
General analytical expression:
Surface equation:
Optimal control law:
Substituting the surface equation, we get:
2.5 Suboptimal systems
Suboptimal systems are systems that are close in properties to optimal ones.
Characterized by an optimality criterion.
Absolute error.
Relative error.
Suboptimal is a process that is close to optimal with a given accuracy.
A suboptimal system is a system where there is at least one suboptimal process.
Suboptimal systems are obtained in the following cases:
when approximating the switching surface (using piecewise linear approximation, approximation using splines)
When in a suboptimal system an optimal process will arise.
limiting the working area of the state space;
3. ADAPTIVE SYSTEMS
3.1 Basic concepts
Adaptive systems are those systems in which the controller parameters change following changes in the object parameters, so that the behavior of the system as a whole remains unchanged and corresponds to the desired:
There are two directions in the theory of adaptive systems:
adaptive systems with a reference model (ASEM);
adaptive systems with identifier (ASI).
3.2 Adaptive systems with ID
Identifier is a device for estimating object parameters (parameter assessment must be carried out in real time).
AR - adaptive regulator
OU - control object
U - identifier
The part that is highlighted with a dotted line can be implemented digitally:
V, U, X - can be vectors. An object can be multi-channel.
Let's consider the operation of the system.
In the case of constant object parameters, the structure and parameters of the adaptive controller do not change, the main feedback operates, the system is a stabilization system.
If the parameters of the object change, then they are assessed by the identifier in real time and the structure and parameters of the adaptive controller change so that the behavior of the system remains unchanged. The main requirements are for the identifier (performance, etc.) and for the identification algorithm itself. This class of systems is used to control objects with slow nonstationarities. If we have a non-stationary object of general form:
;.The simplest adaptive view will be as follows:
Requirements for the system:
Where and are matrices of constant coefficients.
In reality we have:
If we equate, we obtain a relation for determining the controller parameters
3.3 Adaptive systems with reference model
In such systems, there is a reference model (EM), which is placed parallel to the object. BA - adaptation block.
Fig 2 - Functional diagram of ASEM:
Let's look at how the system works:
In the case when the object parameters do not change or the output processes correspond to the reference ones, the error is:
autotuning control programming
The adaptation unit does not work and the adaptive regulator is not rebuilt; smooth feedback operates in the system.
If the behavior is different from the reference one, this happens when changing the object's parameters, in which case an error appears.
The adaptation block is turned on, the structure of the adaptive controller is rebuilt in such a way as to reduce it to a reference model of the object.
The adaptation block must reduce the error to zero ().
The algorithm included in the adaptation block is formed different ways, for example, using the second Lyapunov method:
If this is true, then the system will be asymptotically stable and.
Posted on Allbest.ru
...Similar documents
Statement of the problem of control system synthesis. Application of Pontryagin's Maximum Principle. Method for analytical design of optimal controllers. Bellman's dynamic programming method. Genetic programming and grammatical evolution.
thesis, added 09/17/2013
Methods for solving the problem of synthesizing a control system for a dynamic object. Comparative characteristics parametric and structural-parametric synthesis. Diagram of the symbolic regression process. The principle of operation of the analytical programming method.
thesis, added 09/23/2013
The concept of a large control system. Model of structural coupling of elements. Organization of a multi-level management structure. General linear programming problem. Elements of dynamic programming. Statement of the problem of structural synthesis.
tutorial, added 06/24/2009
Statement of the dynamic programming problem. Behavior of a dynamic system as a function of the initial state. Mathematical formulation of the optimal control problem. Dynamic programming method. Discrete form of the variational problem.
abstract, added 09.29.2008
Study of the main dynamic characteristics of an enterprise along a given control channel, the results of which are sufficient for the synthesis of a control system (CS). Construction of a mathematical model of the control object. Analysis of the frequency characteristics of the control system.
course work, added 07/14/2012
Theory of automatic control. Transfer function of the system according to its structural diagram. Block diagram and transfer function of a continuous ACS. System stability. Study of the transition process. Calculation and construction of frequency characteristics.
course work, added 03/14/2009
General concepts and classification of local control systems. Mathematical models of LSU control object. Methods for linearization of nonlinear equations of control objects. The procedure for synthesis of LSU. Transients using pulse transient functions.
course of lectures, added 03/09/2012
Operating principle and tasks information systems project management. Methods of critical path, analysis and evaluation of plans. Network model and graph, types of paths. Information exchange between enterprises, classification of information systems and their sales markets.
test, added 11/18/2009
Classification of information according to various criteria. Stages of development of information systems. Information Technology and control systems. Levels of the management process. Structural design methods. Methodology functional modeling IDEF0.
course work, added 04/20/2011
Analysis of the main stages of solving the problem of controller synthesis in the class of linear stationary systems. Finding the optimal settings of the controller and the transfer function of a closed-loop system. Study of the composition and structure of the automated control system.
Customization (Extreme Control)
Extreme management gets its name from the specific purpose of this management. The task of extreme control is to achieve an extreme goal, that is, to extremize (minimize or maximize) some indicator of an object, the value of which depends on the controlled and uncontrollable parameters of the object. Extreme control is caused by a very common tuning operation.
Any customization consists of constructing a system of actions that ensures the best operating mode of the customized object. To do this, it is necessary to be able to distinguish between the states of an object and qualify these states so as to know which of the two states should be considered “better” than the other. This means that the tuning process must define a measure of the quality of the tuning.
For example, when setting up a technological process, an indicator of its quality can be the number of defective parts in a batch; in this case, the goal of process tuning is to minimize waste. However, not all extreme objects allow such a simple quantitative representation of the tuning quality indicator. So, for example, when tuning radios or televisions, such measures of tuning quality can be sound quality and quality
images of the received transmission. Here it is already quite difficult to determine the quality indicator of the setting in quantitative form. However, as will be shown below, to solve extreme control problems it is often important to know not the absolute value of the quality indicator, but the sign of its increment during the control process. This means that for management it is enough to know whether the quality indicator has increased or decreased. In the case of tuning radio equipment, a person solves this problem quite well if we're talking about about sound or picture quality.
Rice. 1.3.1.
Thus, in the future it is assumed that there is always an algorithm for processing information of a customized object that allows the quality of setting this object to be determined quantitatively (or the sign of changes in this quality during the control process). Quality of tuning is measured by number Q, which depends on the state of the object’s controlled parameters:
. (1.3.1)
The purpose of the setting is to extremate this indicator, i.e. solve the problem
where the letter S denotes the area of permissible change in the controlled parameters.
In Fig. 1.3.1 shows a block diagram of an extreme object. It is formed from the setting object itself with controlled inputs and observable outputs, which carry information about the state of the object, and a converter, which, based on the information received, forms a scalar indicator of the quality of the object.
An example of an extreme object is a radio receiver in the process of searching for a station. If the audibility of a station decreases (as they say, the station “floats away”), then to obtain the best sound of the transmission, i.e., to tune the receiver, it is necessary to adjust the circuit. Tuning control in this case consists of determining the direction of rotation of the tuning knob. The station's audibility level here is an indicator of the quality of the tuning. It does not carry the necessary

Rice. 1.3.2.
control information, i.e. it does not indicate in which direction the adjustment knob should be turned. Therefore, to obtain the necessary information, a search is introduced - a test movement of the tuning handle in an arbitrary direction, which provides additional and necessary information for tuning. After this, you can already say exactly in which direction you should turn the knob: if audibility has decreased, you need to turn it in the opposite direction, if it has already increased, you should rotate the tuning knob in the same direction until audibility is maximum. Such simplest algorithm search used when tuning a radio receiver, which is a typical example of an extreme object.
Thus, extreme control objects are characterized by insufficient information at the object’s output and the presence of a kind of information “hunger.” To obtain the necessary information in the process of managing extreme objects, it is necessary to enter a search in the form of specially organized trial steps. The search process distinguishes tuning and extreme control from all other types of control.
As a more “serious” example of a one-parameter extremal object, let us consider the problem of optimal damping of a second-order servo system (Fig. 1, 3.2). A master disturbance is supplied to the input of this tracking system y*(t), determining the state of the output y (t). Regarding the nature of behavior y* (t) nothing is known. Moreover, the statistical properties of the disturbance y* (t) can change in unexpected ways.

Rice. 1.3.3.
The task of tuning is to select such damping that makes this servo system optimal in the sense of minimum functionality:
The value of Q is an estimate of the variance of the residual o(t)=y(t)-y*(t) on the base T. Obviously, when setting up the tracking system, one should strive to minimize the value of Q.
Here, the specified tracking system acts as the setting object, the output information for determining the quality of the object’s operation is its input and output, and the converter forms a quality indicator according to formula (1.3.3). The resulting extreme object has the characteristic shown in Fig. 1.3.3. The nature of the dependence Q ( O) expresses the obvious fact that too little damping is just as bad as too much. As can be seen, characteristic (1.3.3) has a pronounced extreme character with a minimum corresponding to optimal damping O*. In addition, the characteristic depends on the properties of the disturbance y*(t). Therefore, the optimal state O*, minimizing Q ( O), also depends on the nature of the specifying disturbance y*(t) and changes with it. This forces us to turn to the creation of special systems automatic settings, maintaining the object in a tuned (extreme) state regardless of the properties of the disturbances. This automatic devices solving the problem settings are called extreme regulators or optimizers (i.e., devices for optimizing an object).
A distinctive feature of extreme objects is the non-monotonic (extreme) characteristics, which leads to the impossibility of using the regulation method to control such objects. Indeed, by observing the output value Q of the object in the example discussed above (see Fig. 1.3.3), it is impossible to construct a control, i.e., determine in which direction the controlled parameter should be changed O. This uncertainty is associated, first of all, with the possibility of two situations and the way out of which to the goal O* is done in exactly the opposite way (in the first case, you should increase O, and in the second - to reduce). Before managing such an object, it is necessary to obtain additional information - in in this example this information consists of determining which branch of the characteristic the object is on. To do this, for example, it is enough to determine the value of the quality indicator at a neighboring point o + ? O, Where? O-- fairly small deviation.
It should be noted that automation of the tuning process is justified only if the extreme characteristic of the object changes over time, i.e., when the extreme state wanders. If the characteristic of the object does not change, then the process of searching for the extremum is one-time in nature and, therefore, does not need automation (it is enough to stabilize the object in the once determined extreme state).
In Fig. 1.3.4 for illustration shows a block diagram of extreme damping control of a tracking system tracking the position of a target at(t), the behavior of which changes.

Rice. 1.3.4.
Here the extreme controller solves the tuning problem, i.e. it maintains such a damping value O, which minimizes the quality indicator of the tracking system.
The need for adaptive (adjustable) control systems arises due to the increasing complexity of control problems in the absence of the practical possibility of a detailed study and description of the processes occurring in control objects in the presence of changing external disturbances. The adaptation effect is achieved due to the fact that part of the functions for receiving, processing and analyzing processes in the control object is performed during the operation of the system. This division of functions contributes to a more complete use of information about ongoing processes in the generation of control signals and can significantly reduce the impact of uncertainty on the quality of control. Thus, adaptive control is necessary in cases where the influence of uncertainty or “incompleteness” of a priori information about the operation of the system becomes significant to ensure the specified quality of control processes. Currently, there is the following classification of adaptive systems: self-adjusting systems, systems with adaptation in special phase states and learning systems.
The class of self-adjusting (extreme) automatic control systems is widespread due to its fairly simple technical implementation. This class of systems is due to the fact that a number of control objects or technological processes have extreme dependencies (minimum or maximum) of the operating parameter on control actions. These include powerful DC motors, technological processes in the chemical industry, Various types furnaces, aircraft jet engines, etc. Let's consider the processes occurring in the furnace during fuel combustion. If there is insufficient air supply, the fuel in the firebox does not burn completely and the amount of heat generated decreases. When there is excess air supply, some of the heat is carried away along with the air. And only with a certain ratio between the amount of air and heat is the maximum temperature in the firebox achieved. In an aircraft turbojet engine, by changing the fuel consumption, it is possible to achieve maximum air pressure behind the compressor, and, consequently, maximum engine thrust. With low and high fuel consumption, the air pressure behind the compressor and thrust drops. In addition, it should be noted that the extreme points of control objects are “floating” in time and space.
In the general case, we can assert that there is an extremum, but at what values of the control action it is achieved is a priori unknown. Under these conditions, the automatic control system during operation must generate a control action that brings the object to an extreme position, and maintain it in this state under conditions of disturbances and the “floating” nature of extreme points. The control device is an extreme regulator.
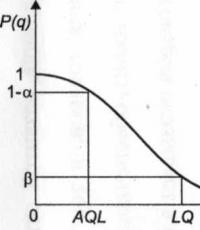
According to the method of obtaining information about the current state of an object, extreme systems are non-search and search. In non-search engines best management is determined by using analytical relationships between the desired value of the operating parameter and the controller parameters. In search engines, which are slow, finding the extremum can be done in various ways. The most widely used method is synchronous detection, which comes down to estimating the derivative dy/du, where y is the controlled (operating) parameter of the control object, u is the control action. A block diagram illustrating the synchronous detection method is shown in Fig. 6.1.
Rice. 6.1 Structure of synchronous detection
An insignificant disturbance in the form of a regular periodic signal f(t) = gsinwt, where g is greater than zero and sufficiently small, is applied to the input of the control object, which has an extreme dependence y(u), together with the control action U. At the output of the control object we obtain y = y(u + gsinwt). The resulting y value is multiplied by the signal f(t). As a result, signal A will take the value
A =yf(t) = y(u+gsinwt)gsinwt.
Assuming that the dependence y(u) is a sufficiently smooth function, it can be expanded into a power series and, with a sufficient degree of accuracy, is limited to the first terms of the expansion
Y(u+gsinwt)=y(u)+gsinwt(dy/du) + 0.5g 2 sin 2 wt(d 2 y/du 2) + ….. .
Since the value of g is small, we can neglect the terms of higher order and as a result we get
Y(u + gsinwt) » y(u) + gsinwt(dy/du).
Then, as a result of multiplication, signal A will take the value
A = y(u)sinwt + g 2 sin 2 wt(dy/du).
At the output of the low-pass filter Ф we get signal B
 .
.
If the filter time constant T is large enough, we get

 .
.
Therefore, signal B at the filter output is proportional to the derivative dy/du
1. I (the Client) hereby express my consent to the processing of my personal data received from me during the submission of an application for information and consulting services/admission to educational programs.
2. I confirm that the number I provided is mobile phone, is my personal phone number assigned to me by the operator cellular communication, and am ready to bear responsibility for the negative consequences caused by my indicating a mobile phone number belonging to another person.
The Group of companies includes:
1. LLC "MBSH", legal address: 119334, Moscow, Leninsky Prospekt, 38 A.
2. ANO DPO "MOSCOW BUSINESS SCHOOL", legal address: 119334, Moscow, Leninsky Prospekt, 38 A.
3. For the purposes of this agreement, “personal data” means:
Personal data that the Client provides about himself consciously and independently when filling out an Application for training/receiving information and consulting services on the pages of the Group of Companies Website
(namely: last name, first name, patronymic (if any), year of birth, level of education of the Client, chosen training program, city of residence, mobile phone number, address Email).
4. Client - an individual (a person who is the legal representative individual, under 18 years of age, in accordance with the legislation of the Russian Federation), who filled out an Application for training/for receiving information and consulting services on the Website of the Group of Companies, thus expressing their intention to use the educational/information and consulting services of the Group of Companies.
5. The group of companies generally does not verify the accuracy of the personal data provided by the Client and does not exercise control over his legal capacity. However, the Group of Companies assumes that the Client provides reliable and sufficient personal information on issues proposed in the registration form (Application form), and keeps this information up to date.
6. The Group of Companies collects and stores only those personal data that are necessary for conducting admission to training/receiving information and consulting services from the Group of Companies and organizing the provision of educational/information and consulting services (execution of agreements and contracts with the Client).
7. The collected information allows you to send information in the form of emails and SMS messages via communication channels (SMS mailing) to the email address and mobile phone number specified by the Client for the purpose of conducting a reception for the provision of services by the Group of Companies to the organization educational process, sending important notices such as changes to the terms, conditions and policies of the Group of Companies. Also, such information is necessary to promptly inform the Client about all changes in the conditions for the provision of information and consulting services and the organization of educational and training admission process to the Group of Companies, informing the Client about upcoming promotions, upcoming events and other events of the Group of Companies, by sending him mailings and information messages, as well as for the purpose of identifying a party under agreements and contracts with the Group of companies, communicating with the Client, including sending notifications, requests and information regarding the provision of services, as well as processing requests and applications from the Client.
8. When working with the Client’s personal data, the Group of Companies is guided by Federal law RF No. 152-FZ dated July 27, 2006 “About personal data.”
9. I am informed that I can unsubscribe from receiving information via email at any time by sending an email to: . You can also unsubscribe from receiving information via email at any time by clicking on the “Unsubscribe” link at the bottom of the letter.
10. I am informed that at any time I can refuse to receive SMS newsletters to my specified mobile phone number by sending an email to the following address:
11. The group of companies takes necessary and sufficient organizational and technical measures to protect the Client’s personal data from unauthorized or accidental access, destruction, modification, blocking, copying, distribution, as well as from other unlawful actions of third parties.
12. This agreement and the relations between the Client and the Group of companies arising in connection with the application of the agreement are subject to the law of the Russian Federation.
13. By this agreement I confirm that I am over 18 years of age and accept the conditions indicated in the text of this agreement, and also give my full voluntary consent to the processing of my personal data.
14. This agreement governing the relationship between the Client and the Group of Companies is valid throughout the entire period of provision of the Services and the Client’s access to the personalized services of the Group of Companies Website.
LLC "MBSH" legal address: 119334, Moscow, Leninsky Prospekt, 38 A.
MBSH Consulting LLC legal address: 119331, Moscow, Vernadsky Avenue, 29, office 520.
CHUDPO "MOSCOW BUSINESS SCHOOL - SEMINARS", legal address: 119334, Moscow, Leninsky Prospekt, 38 A.
The scope of XPM is not limited to software development. Extreme project management will be effective for experienced teams that implement innovative projects, startups, and work in chaotic, unpredictable conditions.
What is Extreme Project Management?
The XPM concept was developed in 2004. But it would be unfair to consider him the only developer. Doug was inspired by a number of techniques from other authors:
- model of radical project management Rob Thomseth,
- APM Jim Highsmith,
- the concept of extreme programming Kenta Beck.
DeCarlo founded Extreme Project Management chaos theory And complex adaptive systems.
Chaos theory is a mathematical field devoted to the description and study of the behavior of nonlinear dynamic systems, which under certain conditions are subject to so-called dynamic chaos.
A complex adaptive system is a system of many interacting components that meets a number of conditions (fractal structure, ability for adaptive activity, etc.). Examples of CAS include a city, ecosystems, and the stock market.
Doug compares extreme project management to jazz.
Although jazz can sound chaotic, it has its own structure, thanks to which musicians have the opportunity to improvise and create real masterpieces.
Instead of following the beaten path, in Extreme Project Management project managers discuss the best alternative with the client, experiment, study the results and use this knowledge in the next project cycle.
One of the properties of some chaotic systems is
which are the objects of consideration of chaos theory - the “butterfly effect”,
became popular after "A Sound of Thunder" by Ray Bradbury
Brian Warnham, author of the book, outlined five steps that an Extreme Project Management team must follow to successfully complete a project:
- See— clearly define the vision of the project before starting extreme project management
- Create- engage the team in creative thought processes and brainstorming to generate and select ideas to achieve the established vision of the project
- Update— encourage the team to test their ideas through the implementation of innovative solutions
- Overestimate— as the development cycle approaches the end, the team should re-evaluate its work
- Distribute- After completing the training, it is important to disseminate the knowledge and apply it to future stages of the project, as well as to new projects in general.
Since people are at the forefront of Extreme Project Management, this also determines the specifics of measuring the success of an XPM project:
- users are satisfied with progress and interim deliveries - there is a feeling that the project is moving in the right direction, despite the surrounding instability.
- users are satisfied with the final delivery.
- team members are satisfied with the quality of their lives while working on the project. If you ask them if they would like to work on a similar project, most will answer yes.
Pros and cons of XPM
Among the main advantages of the methodology, the following should be noted:
- integrity- Although Extreme Project Management includes a variety of methods, tools and templates, they only make sense when applied to the entire project as a whole. As a project manager, you can see the entire project as unified system without the need to analyze its individual parts
- people-oriented— in XPM the emphasis is on the dynamics of the project. It allows stakeholders to interact and communicate, and ultimately meet customer needs
- business focus- once the result is achieved, you will have a clear vision of how the project can benefit your client. The team is constantly focused on delivering product early and often
- humanism- one of the principles of Extreme Project Management. It consists of taking into account the quality of life of the people involved in the project. Being an integral part of the project, passion for work and corporate spirit greatly influence the business, so the physical and moral state of the team is important while working on the project
- reality as a basis— extreme project management allows you to work in an unpredictable, chaotic environment. You cannot change reality to accommodate a project. The opposite happens: you adapt the project to external factors.
There were some downsides too. These include:
- uncertainty— this feature cuts off a large sector of projects, starting with those with critical danger (military facilities, Atom stations, Internet banking applications, etc.), ending with tender projects with a strictly specified budget, deadlines and other project properties;
- high requirements for the experience and qualifications of the project team— it is necessary to constantly adapt to changes in the project environment, establish effective communication with each other, stakeholders and the project manager, and work in short iterations (the latter is relevant for the IT sphere);
- need to change the way of thinking— unlike traditional project management, in which work on a project proceeds according to the usual stages, according to the approved plan and roles, in XPM the team needs to restructure and be prepared for the impossibility of complete control over the project;
- impossibility of long-term planning— yesterday’s plan will not be as relevant as last month’s news. For the team to work correctly to achieve the project goal, it is necessary to demonstrate the qualities of flexibility and self-organization.

- the project is being created in a dynamic environment— there is a constant change of circumstances, speed, requirements;
- possible use trial and error while working on a project;
- An experienced team is working on the project— unlike traditional project management, people, not processes, are at the forefront;
- are developing an application- behind life cycle development software in most cases, it manages to change functionality or expand the list of available platforms. The more users use the software, the more changes can be made, which is what extreme project management is great for.
- this is a meta project— that is, which is divided into many small projects. XPM in this case will help cope with the delay in starting work;
- the business owner is ready to participate in the project from start to finish. Communications must be established "project manager - businessman"
« project manager- stakeholder"
"project manager - business owner - stakeholder."
Stakeholders are people and organizations that influence the project in one way or another. This includes those actively involved in it (project team, sponsor), and those who will use the results of the project (customer), and people who can influence the project, although they do not participate in it (shareholders, partner companies).
Extreme project management requires rapid adaptation of the team to the unusual, constantly changing conditions in which they have to work. Therefore, there are several key rules that are mandatory for the effective use of Extreme Project Management:
An example of the difference classical project management from extreme. In the first, the planned result is achieved, in the second, the desired result.
eXtreme Project Management:
Using Leadership, Principles, and Tools to Deliver Value in the Face of Volatility Doug DeCarlo
#1 for everyone who wants to master Extreme Project Management. Based on experience with more than 250 project teams the author has written a detailed guide to extreme project management. Project managers of the largest international organizations: Management Solutions Group, Inc., Zero Boundary Inc., Guru Unlimited, etc.
Effective Project Management: Traditional, Adaptive, Extreme,
Third Edition Robert K. Wysocki
After reading this you can get an idea not only of extreme project management, but also of adaptive one. One interesting thing is that at the end of each chapter, questions are given to organize the presented material, which is full of real cases of projects from different fields.
Radical Project Management Rob Thomsett
Extreme Project Management is presented from “A” to “Z”, every tool and technique with which Extreme Project Management is implemented is analyzed. Maximum practical information with case analysis.
Architectural Practices: Extreme Project Management for Architects
Not a book, but, but it’s impossible not to include it in the selection because of its uniqueness. This is a comprehensive resource on the use of XPM in architecture and construction. Unfortunately, the author of the site no longer updates it, but the page is still suitable as a cheat sheet.
Verdict
the art and science of facilitating and managing the flow of thoughts, emotions and actions in a way that produces maximum results in complex and unstable environments.
The reasons for the success of XPM among other management techniques lie in three areas:
- Extreme Project Management makes it possible continuous self-correction and self-improvement in real time;
- XPM focuses on defining and following the project mission, instilling confidence in stakeholders and the project team;
- people-oriented, humanism and the priority of people over processes as key features methodology.