Екстремно управление на проекти. Екстремни автоматични системи за управление. Методи за търсене на екстремум. Екстремното управление на проекти изисква бърза адаптация на екипа към необичайните, постоянно променящи се условия, в които трябва да работи.
Изпратете добрата си работа в базата знания е лесно. Използвайте формата по-долу
Студенти, докторанти, млади учени, които използват базата от знания в обучението и работата си, ще ви бъдат много благодарни.
Публикувано на http://www.allbest.ru/
1. Екстремни системи за контрол
Системите за екстремен контрол са онези самоходни оръдия, при които един от показателите за ефективност трябва да се поддържа на максимално ниво (мин. или макс.).
Класически пример за екстремен контрол е системата за автоматичен контрол на честотата на радиоприемник.
Фиг.1.1 - Амплитудно-честотна характеристика:
1.1 Постановка на проблема за синтеза на екстремални системи
Обектите се описват с уравнения:
Една екстремна характеристика се променя с времето.
Необходимо е да се избере контролно действие, което да позволи автоматично намиране на екстремума и поддържане на системата в тази точка.
U: extr Y=Y o (1.2)
Фиг.1.2 - Статична екстремна характеристика:
Необходимо е да се определи контролното действие, което гарантира изпълнението на имуществото:
1.2 Екстремално състояние
Необходимо условие за екстремум е равенството на първите частни производни на нула.
Достатъчно условие за екстремум е равенството на вторите частни производни на нула. При синтезиране на екстремна система е необходимо да се оцени градиентът, но е невъзможно да се оцени векторът на вторите частни производни и на практика вместо достатъчно условие за екстремум се използва връзката:
Етапи на синтез на екстремна система:
Градиентна оценка.
Организация на движението в съответствие с условието за движение към екстремум.
Стабилизиране на системата в екстремна точка.
Фиг.1.3 - Функционална схемаекстремна система:
1.3 - Видове екстремни характеристики
1) Унимодална екстремална характеристика на типа модул
Ориз. 1.4 - Екстремни характеристики на типа модул:
2) Екстремна характеристика на типа парабола
Ориз. 1.5 - Екстремна характеристика на типа парабола:
3) В общия случай екстремалната характеристика може да се опише с парабола от n-ти ред:
Y = k 1 |y-y o (t)| n + k 2 |y-y o (t)| n -1 + …+k n | y-y o (t)| + k n +1 (t).(1.9)
4) Векторно-матрично представяне:
Y = y T Чрез (1.10)
1.4 Методи за оценка на градиента
1.4.1 Метод за разделяне на производни
Нека го разгледаме на унимодална характеристика, y е изходът на динамичната част на системата.
yR 1, Y = Y(y,t)
Нека намерим общата производна по време:
С бавен дрифт, така
Предимство: простота.
Недостатък: при малък 0 градиентът не може да бъде определен.
Диференциращ филтър.
Ориз. 1.6 - Схема за оценка на частната производна:
1.4.2 Оценка на дискретния градиент
Ориз. 1.7 - Схема за дискретно оценяване на частна производна:
1.4.3 Дискретна оценка на знака на градиента
За малка стъпка на вземане на проби заместваме:
1.4.4 Метод за синхронно откриване
Методът за синхронно откриване включва добавяне на допълнителен синусоидален сигнал с ниска амплитуда и висока честота към входния сигнал към екстремен обект и отделяне на съответния компонент от изходния сигнал. Въз основа на фазовата връзка на тези два сигнала можем да заключим знака на частните производни.
Ориз. 1.8 - Функционална диаграма за оценка на частната производна:
Ориз. 1.9 - Илюстрация на преминаването на трептения за търсене към изхода на системата:
y 1 е работната точка, а фазовата разлика на сигналите е 0.
y 2 е фазовата разлика на сигналите; като най-прост FNC може да се използва умножителен блок.
Ориз. 1.10 - Илюстрация на работата на FNC:
Като филтър е избран филтър, осредняващ за период, който позволява да се получи изходен сигнал, пропорционален на стойността на частичната производна.
Ориз. 1.11 - Линеаризация на статичната характеристика в работната точка:
Следователно уравнението на екстремна крива може да бъде заменено с уравнението на права линия:
Сигнал на изхода на FNC:
k - коефициент на пропорционалност - тангенс на ъгъла на наклона на правата линия.
Филтърен изходен сигнал:
По този начин:
Методът за синхронно детектиране е подходящ за определяне не само на една частна производна, но и на градиента като цяло, като на входа се подават няколко трептения с различни честоти. Съответните изходни филтри подчертават отговора на конкретен сигнал за търсене.
1.4.5 Специален филтър за оценка на градиента
Този метод включва въвеждането на специална динамична система в системата, чийто междинен сигнал е равен на частичната производна.
Ориз. 1.12 - Схема на специален филтър за оценка на частичната производна:
T - времеконстанта на филтъра:
Използва се DF диференциращ филтър за оценка на общата производна на Y и след това тази оценка на общата производна се използва за оценка на градиента.
1.5 Организация на движение към екстремум
1.5.1 Системи от първи ред
Организираме закона за управление пропорционално на градиента:
Нека напишем уравнението на затворената система:
Това е обикновено диференциално уравнение, което може да се изучава с помощта на TAU методи.
Разгледайте статичното уравнение на системата:
Ако осигурим стабилността на система със затворен контур, използвайки усилването k, тогава автоматично в статични условия ще достигнем екстремалната точка.
В някои случаи, използвайки коефициента k, в допълнение към стабилността, е възможно да се осигури определена продължителност на преходния процес в затворена система, т.е. осигурява определеното време за достигане на екстремума.
Където k е стабилност
Ориз. 1.13 - Функционална диаграма на градиентна екстремална система от първи ред:
Този метод е подходящ само за унимодални системи, т.е. системи с един глобален екстремум.
1.5.2 Метод с тежка топка
По аналогия с топка, която се търкаля в дере и преодолява точките на локалните екстремуми, AC система с осцилаторни процеси също преодолява локалните екстремуми. За да осигурим колебателни процеси, въвеждаме допълнителна инерция в системата от първи ред.
Ориз. 1.14 - Илюстрация на метода на "тежката" топка:
Уравнение на затворен контур;
Характеристично уравнение на системата:
Колкото по-малък е d, толкова по-дълъг е преходният процес.
Анализирайки екстремната характеристика се задава необходимото превишение и продължителност на преходния процес, от които се задават:
1.5.3 Едноканални системи общ изглед
Закон за контрол:
Замествайки закона за управление в управлението на обекта, получаваме уравнението на затворената система:
В общия случай, за да се анализира стабилността на система със затворен контур, е необходимо да се използва вторият метод на Ляпунов, с помощта на който се определя коефициентът на усилване на контролера. защото Вторият метод на Ляпунов осигурява само достатъчно условие за стабилност, тогава избраната функция на Ляпунов може да се окаже неуспешна и тук не може да бъде предложена редовна процедура за изчисляване на контролера.
1.5.4 Системи с най-висока производна при управление
Общ случай на екстремум от обекти:
Функциите f, B и g трябва да отговарят на условията за съществуване и уникалност на решение на диференциалното уравнение. Функцията g - трябва да бъде многократно диференцируема.
C - матрица на производните
Проблемът със синтеза е разрешим, ако матрицата на продукта е неединична, т.е.
Анализът на условията за разрешимост на проблема със синтеза ни позволява да определим производната на изходните променливи, която ясно зависи от управляващото действие.
Ако условието (1.31) е изпълнено, тогава такава производна е първата производна и следователно изискванията за поведението на затворена система могат да бъдат формирани под формата на диференциално уравнение за y от съответния ред.
Нека формираме закон за управление за система със затворен цикъл, за която формираме закон за управление, като заместим в дясната страна на управлението за:
Уравнение в затворен цикъл по отношение на изходната променлива.
Нека разгледаме ситуацията, когато
С подходящ избор на усилване получаваме желаното уравнение и автоматичен достъп до екстремума.
Параметрите на контролера се избират въз основа на същите съображения, както при конвенционалните самоходни оръдия, т.е. (SVK) i = (20*100), което ни позволява да предоставим подходящата грешка.
Ориз. 1.15 - Диаграма на система с най-висока производна в контрола:
В една система диференциращ филтър се въвежда в системата за оценка на общата времева производна, така че е удобно да се използва филтър за оценка на градиента за оценка на градиенти в такива системи. защото И двата филтъра имат малки времеви константи, след което в системата могат да възникнат процеси с различни темпове, които могат да бъдат идентифицирани с помощта на метода за разделяне на движенията, а бавните движения ще бъдат описани с уравнение (1.34), което съответства на желаното при. Бързите движения трябва да бъдат анализирани за стабилност и в зависимост от съотношението на времевата константа на DF и филтъра за оценка на частични производни (PDE), могат да се разграничат следните типове движения:
1) Времеконстантите на тези филтри са сравними.
Бързите движения описват комбинираните процеси в тези два филтъра.
2) Времеконстантите се различават с порядък.
В допълнение към бавните движения, в системата се наблюдават бързи и свръхбързи движения, съответстващи на най-малката времева константа.
И двата случая трябва да бъдат анализирани за стабилност.
2. Оптимални системи
Оптималните системи са системи, в които дадено качество на работа се постига чрез максимално използване на възможностите на обекта, с други думи, това са системи, в които обектът работи на границата на своите възможности. Нека разгледаме апериодична връзка от първи ред.
За което е необходимо да се осигури минимално време за преход y от начално състояние y(0) до крайно състояние y k . Преходната функция на такава система за K=1 изглежда така:
Ориз. 2.1 - Преходна функция на системата при U= const:
Нека разгледаме ситуацията, когато прилагаме максимално възможното управляващо действие към входа на обекта.
Ориз. 2.2 - Преходна функция на системата при U=A= const:
t 1 - минималното възможно време на преход y от нулево състояние до крайно състояние за даден обект.
За да се получи такъв преход, има два закона за управление:
Вторият закон е по-предпочитан и позволява контрол в случай на смущения.
Ориз. 2.3 - Блокова схема на система със закон за управление с обратна връзка:
2.2 Постановка на проблема за синтеза на оптимални системи
2.2.1 Математически модел на обекта
Един обект се описва от променливи на състоянието
Където функцията f(x,u) е непрекъсната, диференцируема по отношение на всички аргументи и удовлетворява условието за съществуване и уникалност на решение на диференциалното уравнение.
Тази функция е нелинейна, но стационарна. Като специални случаи обектът може да приеме формата на нелинейна система с адитивно управление:
Или линейна система
Обектът трябва да бъде представен в една от трите форми, представени по-горе.
2.2.2 Множество начални и крайни състояния
Проблемът за оптимален преход от начално състояние към крайно състояние е граничен проблем
Където началната и крайната точка могат да бъдат определени по един от четирите начина, показани на фиг. 2.4.
а) проблем с фиксирани краища,
б) проблем с фиксиран първи край (фиксирана начална точка и набор от крайни стойности),
в) проблем с фиксиран десен край,
г) проблем с движещи се краища.
Фиг. 2.4 - Фазови портрети на прехода на системата от първоначалното състояние към крайното състояние за различни задачи:
За даден обект наборът от начални състояния може като цяло да съвпада с целия набор от състояния или работното пространство, а наборът от крайни състояния е подпространство на набора от състояния или работното пространство.
Пример 2.1 - Възможно ли е да се прехвърли обект, описан от система от уравнения, до произволна точка от пространството на състоянията?
Като заместим стойността U от първото уравнение във второто уравнение u = x 2 0 - 2x 1 0, получаваме -5x 1 0 + x 2 0 = 0;
Получихме набор от крайни състояния, описани с уравнението x 2 0 = 5x 1 0 ;
По този начин наборът от крайни състояния, определени за обект (система), трябва да бъде реализуем.
2.2.3 Състояние и контролни ограничения
Ориз. 2.5 - Общ изглед на работната зона на пространството на състоянието:
Разпределя се и се определя работна зона на пространството на състоянието. Обикновено тази област се описва чрез нейните граници, като се използват модулни конвенции.
Фиг.2.6 - Изглед на работната зона на пространството на състоянията, дефинирана от модулни конвенции:
Също така е посочен U - диапазонът на допустимите стойности на управляващото действие. На практика регионът U също се определя с помощта на модулни отношения.
Проблемът за синтезиране на оптимален регулатор се решава при ограничения за управление и ограничен ресурс.
2.2.4 Критерий за оптималност
На този етап се уточняват изискванията за качеството на работа на затворената система. Изискванията се задават в обобщен вид, а именно под формата на интегрален функционал, който се нарича критерий за оптималност.
Общ изглед на критерия за оптималност:
Специфични видове критерий за оптималност:
1) критерий за оптималност, осигуряващ минимално време на процеса на преход (проблемът с оптималната производителност е решен):
2) критерий за оптималност, който осигурява минимална консумация на енергия:
За един от компонентите:
За всички променливи състояния:
За едно контролно действие:
За всички контролни действия:
За всички компоненти (в най-общия случай):
2.2.5 Форма за резултат
Необходимо е да се уговори под каква форма ще търсим контролното действие.
Има две възможности оптимален контрол: u 0 = u 0 (t), използван при отсъствие на смущения, u 0 = u 0 (x), оптимално управление под формата на обратна връзка (контрол в затворен контур).
Формулиране на задачата за синтезиране на оптимална система в общ вид:
За обект, описан от променливи състояния със зададени ограничения и набор от начални и крайни състояния, е необходимо да се намери управляващо действие, което да гарантира качеството на процесите в затворена система, което отговаря на критерия за оптималност.
2.3 Метод на динамично програмиране
2.3.1 Принцип на оптималност
Първоначални данни:
Необходимо е да се намери u 0:
Ориз. 2.7 - Фазов портрет на прехода на системата от началната точка към крайната точка в пространството на състоянието:
Траекторията на преход от началната до крайната точка ще бъде оптимална и уникална.
Изявление на принципа: Крайният участък от оптимална траектория също е оптимална траектория. Ако преходът от междинната точка към крайната точка не се извършва по оптимална траектория, тогава би било възможно да се намери собствена оптимална траектория за нея. Но в този случай преходът от началната точка до крайната точка ще се осъществи по различна траектория, която би трябвало да е оптимална, но това е невъзможно, тъй като има само една оптимална траектория.
2.3.2 Основното уравнение на Белман
Нека разгледаме контролен обект от произволен тип:
Помислете за преход в пространството на състоянието:
Ориз. 2.8 - Фазов портрет на прехода на системата от началната към крайната точка x(t) е текущата (началната) точка, x(t+Дt) е междинната точка.
Нека трансформираме израза:
Нека заместим втория интеграл с V(x(t+Дt)):
За малка стойност на Dt въвеждаме следните допускания:
2) Нека разширим спомагателната функция
Извършвайки по-нататъшни трансформации, получаваме:
Където min V(x(t)) е критерият за оптималност J.
В резултат получихме:
Нека разделим двете страни на израза на Dt и елиминираме Dt до нула:
Получаваме основното уравнение на Белман:
2.2.3 Изчислителни съотношения на метода на динамично програмиране:
Основното уравнение на Белман съдържа (m+1) неизвестни величини, т.к U 0 R m , VR 1:
След като диференцираме m пъти, получаваме система от (m+1) уравнения.
За ограничен набор от обекти решаването на получената система от уравнения осигурява точно оптимално управление. Този проблем се нарича проблем AKOR (аналитично проектиране на оптимални контролери).
Обектите, за които се разглежда задачата AKOR, трябва да отговарят на следните изисквания:
Критерият за оптималност трябва да бъде квадратичен:
Пример 2.2
За обект, описан от уравнението:
Необходимо е да се осигури преход от x(0) към x(T) според критерия за оптималност:
След като анализираме обекта за стабилност, получаваме:
U 0 = U 2 = -6x.
2.4 Максималният принцип на Понтрягин
Нека въведем разширен вектор на състоянието, който разширяваме поради нулевия компонент, за който избираме критерия за оптималност. zR n+1
Въвеждаме също разширен вектор от десни части, който разширяваме с помощта на функцията под интеграла в критерия за оптималност.
Нека въведем Ш - вектор на спрегнатите координати:
Нека формираме Хамилтониана, който е скаларното произведение на W и μ(z,u):
H(W,z,u) = W*t(z,u),(2.33)
Уравнение (2.34) се нарича основно уравнение на принципа на максимума на Понтрягин, базирано на уравнението за динамично програмиране. Оптималното управление е това, което осигурява Хамилтоновия максимум за даден интервал от време. Ако контролният ресурс не беше ограничен, тогава биха могли да се използват необходими и достатъчни екстремални условия за определяне на оптимален контрол. В реална ситуация, за да се намери оптимално управление, е необходимо да се анализира стойността на Хамилтониана при граничната стойност на нивото. В този случай U 0 ще бъде функция на разширения вектор на състоянието и вектора на спрегнатите координати u 0 = u 0 .
За да намерите конюгирани координати, е необходимо да решите системата от уравнения:
2.4.1 Процедура за изчисляване на системата с помощта на принципа на максимума на Понтрягин.
Уравненията на обекта трябва да бъдат доведени до стандартната форма за синтез на оптимални системи:
Също така е необходимо да се уточнят началното и крайното състояние и да се запише критерият за оптималност.
Въвежда се разширеният вектор на състоянието
Разширен вектор на десните страни:
И векторът на спрегнатите координати:
Записваме Хамилтониана като скаларен продукт:
Намиране на максимума на Хамилтониана в u:
С което определяме оптималното управление u 0 (Ш,z).
Пишем диференциални уравнения за вектора на спрегнатите координати:
Намираме спрегнатите координати като функция на времето:
6. Определете окончателния оптимален закон за управление:
По правило този метод ви позволява да получите закон за управление на програмата.
Пример 2.3 - За обекта, показан на фиг. 2. 9. необходимо е да се осигури преход от началната точка y(t) до крайната точка y(t) в T= 1c с качеството на процеса:
Ориз. 2.9 - Обектен модел:
За да се определят константите b 1 и b 2, е необходимо да се реши гранична задача.
Нека напишем уравнението на затворената система
Нека интегрираме:
Разгледайте крайната точка t=T=1s., като x 1 (T)=1 и x 2 (T)=0:
1= 1/6 b 1 + 1/2 b 2
Получихме система от уравнения, от която намираме b 2 = 6, b 1 = -12.
Нека напишем закона за управление u 0 = -12t + 6.
2.4.2 Проблем за оптимално управление
За общ обект е необходимо да се осигури преход от началната точка до крайната точка за минимално време при ограничен закон за управление.
Характеристики на задачата за оптимална производителност
Хамилтониан на производителността:
Контролно реле:
Тази функция се появява за релейни обекти.
Теорема за броя на превключванията на управляващото действие:
Тази теорема е валидна за линейни модели с реални корени на характеристичното уравнение.
Det (pI - A) =0 (2,51)
A(A) е вектор от реални собствени стойности.
Твърдение на теоремата:
В проблема за оптимална производителност с реални корени на характеристичното уравнение, броят на превключванията не може да бъде по-голям от (n-1), където n е редът на обекта, следователно броят на интервалите на постоянство на управлението няма да бъде по-голям от (n-1).
Ориз. 2.10 - Вид контролно действие при n=3:
Пример 2.4 - Разгледайте пример за решаване на проблема с оптималната производителност:
Ш=[Ш 1, Ш 2]
H b = W 1 x 2 + W 2 (-2dx 2 -x 1 +u)
Когато - корените са истински:
Сборът от два показателя е:
Ако, тогава корените са комплексно спрегнати и решението ще бъде периодична функция. В една реална система има не повече от 5 - 6 превключвания.
2.4.3 Метод на превключваща повърхност
Този метод ви позволява да намерите управлението на функциите на променливата на състоянието за случая, когато оптималното управление е от релеен характер. По този начин този метод може да се използва при решаване на проблеми с оптимална производителност за обект с адитивен контрол
Същността на метода е да се идентифицират точки в цялото пространство на състоянията, където контролният знак се променя и да се комбинират в обща превключваща повърхност.
Превключваща повърхност
Законът за контрол ще има следната форма:
За да се образува превключваща повърхност, е по-удобно да се разгледа преходът от произволна начална точка към началото на координатите
Ако крайната точка не съвпада с началото, тогава е необходимо да изберете нови променливи, за които това условие ще бъде вярно.
Имаме обект на формата
Разглеждаме прехода с критерия за оптималност:
Този критерий ни позволява да намерим закон за управление от този тип:
С неизвестното, началните условия също са неизвестни за нас.
Като се има предвид преходът:
Метод на обратното време (метод на обратното движение).
Този метод ви позволява да определите превключващите повърхности.
Същността на метода е, че началната и крайната точка се разменят и вместо два набора от начални условия остава един за.
Всяка от тези траектории ще бъде оптимална. Първо намираме точките, в които управлението променя знака и ги комбинираме в повърхност, след което променяме посоката на движение към противоположната.
Пример - Трансферната функция на обект има формата:
Критерий за оптимална работа:
Контролни ограничения.
Помислете за прехода:
Оптималното управление ще има релеен характер:
Нека да обърнем времето (т.е.). В обратно време проблемът ще изглежда така
Нека разгледаме два случая:
Получаваме уравненията на затворената система:
Нека използваме метода на прякото интегриране, получаваме зависимост от и тъй като -, тогава имаме
защото началната и крайната точка се разменят, след което получаваме по подобен начин:
Нека изградим резултата и използваме метода на фазовата равнина, за да определим посоката
Прилагайки метода на директното интегриране, получаваме:
Функцията ще изглежда така:
Промяна на посоката:
Точка на смяна на знака (точка на превключване).
Общ аналитичен израз:
Уравнение на повърхността:
Закон за оптимално управление:
Замествайки уравнението на повърхността, получаваме:
2.5 Неоптимални системи
Субоптималните системи са системи, които са близки по свойства до оптималните.
Характеризира се с критерий за оптималност.
Абсолютна грешка.
Относителна грешка.
Субоптимален е процес, който е близък до оптималния с дадена точност.
Неоптимална система е система, в която има поне един неоптимален процес.
Неоптимални системи се получават в следните случаи:
при сближаване на повърхността на превключване (използване на частично линейно сближаване, сближаване с помощта на сплайни)
Когато в неоптимална система ще възникне оптимален процес.
ограничаване на работната зона на държавното пространство;
3. АДАПТИВНИ СИСТЕМИ
3.1 Основни понятия
Адаптивните системи са тези системи, в които параметрите на контролера се променят след промени в параметрите на обекта, така че поведението на системата като цяло остава непроменено и съответства на желаното:
Има две направления в теорията на адаптивните системи:
адаптивни системи с референтен модел (ASEM);
адаптивни системи с идентификатор (ASI).
3.2 Адаптивни системи с ID
Идентификаторът е устройство за оценка на параметрите на обекта (оценката на параметрите трябва да се извършва в реално време).
AR - адаптивен регулатор
ОУ - обект на управление
U - идентификатор
Частта, която е маркирана с пунктирана линия, може да бъде внедрена цифрово:
V, U, X - могат да бъдат вектори. Един обект може да бъде многоканален.
Нека разгледаме работата на системата.
При постоянни параметри на обекта структурата и параметрите на адаптивния регулатор не се променят, работи основната обратна връзка, системата е стабилизираща.
Ако параметрите на обекта се променят, тогава те се оценяват от идентификатора в реално време и структурата и параметрите на адаптивния контролер се променят, така че поведението на системата да остане непроменено. Основните изисквания са към идентификатора (производителност и др.) и към самия алгоритъм за идентификация. Този клас системи се използват за управление на обекти с бавна нестационарност. Ако имаме нестационарен обект от общ вид:
;.Най-простият адаптивен изглед ще бъде както следва:
Изисквания към системата:
Където и са матрици на постоянни коефициенти.
В действителност имаме:
Ако приравним, получаваме връзка за определяне на параметрите на регулатора
3.3 Адаптивни системи с референтен модел
В такива системи има еталонен модел (ЕМ), който се поставя успоредно на обекта. BA - адаптационен блок.
Фигура 2 - Функционална диаграма на ASEM:
Нека да разгледаме как работи системата:
В случай, че параметрите на обекта не се променят или изходните процеси съответстват на референтните, грешката е:
програмиране на управлението на автонастройката
Блокът за адаптация не работи и адаптивният регулатор не е възстановен, в системата работи гладка обратна връзка.
Ако поведението е различно от референтното, това се случва при промяна на параметрите на обекта, в който случай се появява грешка.
Блокът за адаптация е включен, структурата на адаптивния контролер е преустроена по такъв начин, че да се сведе до еталонен модел на обекта.
Блокът за адаптиране трябва да намали грешката до нула ().
Формира се алгоритъмът, включен в адаптационния блок различни начини, например, използвайки втория метод на Ляпунов:
Ако това е вярно, тогава системата ще бъде асимптотично стабилна и.
Публикувано на Allbest.ru
...Подобни документи
Постановка на проблема за синтеза на система за управление. Приложение на принципа на максимума на Понтрягин. Метод за аналитично проектиране на оптимални регулатори. Методът на динамично програмиране на Белман. Генетично програмиране и граматична еволюция.
дисертация, добавена на 17.09.2013 г
Методи за решаване на задачата за синтезиране на система за управление на динамичен обект. Сравнителна характеристикапараметричен и структурно-параметричен синтез. Диаграма на процеса на символична регресия. Принципът на действие на метода за аналитично програмиране.
дисертация, добавена на 23.09.2013 г
Концепцията за голяма система за управление. Модел на структурно свързване на елементи. Организация на многостепенна структура на управление. Обща задача за линейно програмиране. Елементи на динамичното програмиране. Постановка на проблема за структурния синтез.
урок, добавен на 24.06.2009 г
Постановка на проблема с динамичното програмиране. Поведението на динамична система като функция от началното състояние. Математическа постановка на задачата за оптимално управление. Метод на динамично програмиране. Дискретна форма на вариационната задача.
резюме, добавено на 29.09.2008 г
Изследване на основните динамични характеристики на предприятието по даден канал за управление, резултатите от които са достатъчни за синтеза на система за управление (CS). Изграждане на математически модел на обект на управление. Анализ на честотните характеристики на системата за управление.
курсова работа, добавена на 14.07.2012 г
Теория на автоматичното управление. Предавателна функция на системата според нейната структурна схема. Блокова схема и предавателна функция на непрекъсната САР. Стабилност на системата. Изследване на преходния процес. Изчисляване и изграждане на честотни характеристики.
курсова работа, добавена на 14.03.2009 г
Общи понятияи класификация на локалните системи за управление. Математически модели на обект за управление на LSU. Методи за линеаризация на нелинейни уравнения на обекти на управление. Процедурата за синтез на LSU. Преходни процеси, използващи импулсни преходни функции.
курс на лекции, добавен на 03/09/2012
Принцип на действие и задачи информационни системиуправление на проекти. Методи за критичен път, анализ и оценка на планове. Мрежов модел и графика, видове пътища. Обмен на информация между предприятията, класификация на информационните системи и техните пазари за продажба.
тест, добавен на 18.11.2009 г
Класификация на информацията по различни критерии. Етапи на развитие на информационните системи. Информационни технологиии системи за управление. Нива на управленския процес. Методи за конструктивно проектиране. Методика функционално моделиране IDEF0.
курсова работа, добавена на 20.04.2011 г
Анализ на основните етапи на решаване на задачата за синтез на регулатор в класа на линейни стационарни системи. Намиране на оптимални настройки на регулатора и предавателната функция на затворена система. Изследване на състава и структурата на автоматизираната система за управление.
Персонализиране (Изключителен контрол)
Екстремният мениджмънт получава името си от специфичната цел на това управление. Задачата на екстремния контрол е да се постигне екстремна цел, тоест да се екстремизира (минимизира или максимизира) някакъв показател на обект, чиято стойност зависи от контролираните и неконтролируемите параметри на обекта. Екстремният контрол се дължи на много често срещана операция за настройка.
Всяка персонализация се състои в изграждане на система от действия, която осигурява най-добрия режим на работа на персонализирания обект. За да направите това, е необходимо да можете да правите разлика между състоянията на даден обект и да квалифицирате тези състояния, така че да знаете кое от двете състояния трябва да се счита за „по-добро“ от другото. Това означава, че процесът на настройка трябва да определи мярка за качеството на настройката.
Например, при настройване на технологичен процес показател за неговото качество може да бъде броят на дефектните части в партида; в този случай целта на настройката на процеса е да се сведат до минимум отпадъците. Въпреки това, не всички екстремни обекти позволяват такова просто количествено представяне на индикатора за качество на настройката. Така например, когато настройвате радио или телевизори, такива мерки за качество на настройка могат да бъдат качеството на звука и качеството
изображения на полученото предаване. Тук вече е доста трудно да се определи качественият показател на настройката в количествена форма. Въпреки това, както ще бъде показано по-долу, за решаване на проблеми с екстремно управление често е важно да се знае не абсолютната стойност на индикатора за качество, а знакът на неговото нарастване по време на процеса на управление. Това означава, че за ръководството е достатъчно да знае дали показателят за качество се е увеличил или намалял. В случай на настройка на радио оборудване, човек решава този проблем доста добре, ако ние говорим заотносно качеството на звука или картината.
Ориз. 1.3.1.
По този начин в бъдеще се предполага, че винаги има алгоритъм за обработка на информация за персонализиран обект, който позволява да се определи количествено качеството на настройката на този обект (или знака на промените в това качество по време на процеса на управление). Качеството на настройката се измерва с брой Q,което зависи от състоянието на контролираните параметри на обекта:
. (1.3.1)
Целта на настройката е екстремиране на този индикатор, т.е. решаване на проблема
където буквата S означава зоната на допустима промяна в контролираните параметри.
На фиг. 1.3.1 показва блокова схема на екстремен обект. Той се формира от самия обект на настройка с контролирани входове и наблюдаеми изходи, които носят информация за състоянието на обекта, и конвертор, който на базата на получената информация формира скаларен индикатор за качеството на обекта.
Пример за екстремен обект е радиоприемник в процеса на търсене на станция. Ако чуваемостта на дадена станция намалее (както се казва, станцията „отплува“), тогава за да получите най-добрия звук на предаването, т.е. да настроите приемника, е необходимо да регулирате веригата. Контролът на настройката в този случай се състои в определяне на посоката на въртене на копчето за настройка. Нивото на чуваемост на станцията тук е индикатор за качеството на настройката. Не носи необходимото

Ориз. 1.3.2.
контролна информация, т.е. не показва в каква посока трябва да се завърти копчето за настройка. Следователно, за получаване на необходимата информация се въвежда търсене - пробно движение на ръкохватката за настройка в произволна посока, което дава допълнителна и необходима информация за настройка. След това вече можете да кажете точно в каква посока трябва да завъртите копчето: ако чуваемостта е намаляла, трябва да я завъртите в обратната посока, ако вече се е увеличила, трябва да завъртите копчето за настройка в същата посока, докато чуваемостта е максимално. Такива най-простият алгоритъмтърсене, използвано при настройка на радиоприемник, което е типичен пример за екстремен обект.
По този начин екстремните обекти на управление се характеризират с недостатъчна информация на изхода на обекта и наличието на вид информационен „глад“. За да получите необходимата информация в процеса на управление на екстремни обекти, е необходимо да въведете търсене под формата на специално организирани пробни стъпки. Процесът на търсене отличава настройката и екстремния контрол от всички други видове контрол.
Като по-сериозен пример за еднопараметърен екстремален обект, нека разгледаме проблема за оптималното затихване на серво система от втори ред (фиг. 1, 3.2). На входа на тази проследяваща система се подава основно смущение y*(t),определяне на състоянието на изхода y (t). Относно характера на поведението y* (t)нищо не се знае. Освен това, статистическите свойства на смущението y* (t) могат да се променят по неочаквани начини.

Ориз. 1.3.3.
Задачата на настройката е да се избере такова затихване, което прави тази серво система оптимална в смисъл на минимална функционалност:
Стойността на Q е оценка на дисперсията на остатъка o(t)=y(t)-y*(t)върху основата T. Очевидно, когато настройвате системата за проследяване, трябва да се стремите да сведете до минимум стойността на Q.
Тук определената система за проследяване действа като обект на настройка, изходната информация за определяне на качеството на работата на обекта е неговият вход и изход, а преобразувателят формира индикатор за качество съгласно формула (1.3.3). Полученият екстремен обект има характеристиката, показана на фиг. 1.3.3. Характерът на зависимостта Q ( О) изразява очевидния факт, че твърде малкото затихване е също толкова лошо, колкото и прекаленото. Както се вижда, характеристиката (1.3.3) има ясно изразен екстремен характер с минимум, съответстващ на оптимално затихване О*. В допълнение, характеристиката зависи от свойствата на смущението y*(t).Следователно оптималното състояние О*,минимизиране на Q ( О), също зависи от естеството на определящото смущение y*(t) и се променя с него. Това ни принуждава да се обърнем към създаването на специални системи автоматични настройки, поддържане на обекта в настроено (екстремно) състояние независимо от свойствата на смущенията. Това автоматични устройства разрешаване на проблеманастройките се наричат екстремни регулатори или оптимизатори (т.е. устройства за оптимизиране на обект).
Отличителна черта на екстремните обекти са немонотонните (екстремни) характеристики, което води до невъзможността да се използва методът на регулиране за управление на такива обекти. Наистина, чрез наблюдение на изходната стойност Q на обекта в примера, разгледан по-горе (виж Фиг. 1.3.3), е невъзможно да се конструира управление, т.е. да се определи в каква посока трябва да се промени контролираният параметър О.Тази несигурност е свързана преди всичко с възможността за две ситуации и изхода от които към целта о*се прави по точно обратния начин (в първия случай трябва да увеличите О,а във втория – да намали). Преди да управлявате такъв обект, е необходимо да получите допълнителна информация - в в този примертази информация се състои в определяне на кой клон на характеристиката е обектът. За да направите това, например, достатъчно е да определите стойността на индикатора за качество в съседна точка о +? О,Където? О-- сравнително малко отклонение.
Трябва да се отбележи, че автоматизацията на процеса на настройка е оправдана само ако екстремната характеристика на обекта се променя с течение на времето, т.е. когато екстремното състояние се лута. Ако характеристиката на обекта не се променя, тогава процесът на търсене на екстремума е еднократен по природа и следователно не се нуждае от автоматизация (достатъчно е обектът да се стабилизира в веднъж определеното екстремално състояние).
На фиг. 1.3.4 за илюстрация показва блокова диаграма на контрол на екстремното затихване на система за проследяване, проследяваща позицията на целта при(t), чието поведение се променя.

Ориз. 1.3.4.
Тук екстремният контролер решава проблема с настройката, т.е. поддържа такава стойност на затихване О, което минимизира индикатора за качество на системата за проследяване.
Необходимостта от адаптивни (регулируеми) системи за управление възниква поради нарастващата сложност на проблемите на управлението при липса на практическа възможност за подробно изследване и описание на процесите, протичащи в обектите на управление при наличие на променящи се външни смущения. Ефектът на адаптация се постига благодарение на това, че част от функциите по приемане, обработка и анализ на процесите в обекта на управление се изпълняват по време на работа на системата. Това разделение на функциите допринася за по-пълното използване на информацията за протичащите процеси при генериране на управляващи сигнали и може значително да намали влиянието на несигурността върху качеството на управлението. По този начин адаптивното управление е необходимо в случаите, когато влиянието на несигурността или „непълнотата“ на априорна информация за работата на системата става значително, за да се гарантира определеното качество на процесите на управление. В момента има следната класификация на адаптивните системи: самонастройващи се системи, системи с адаптация в специални фазови състояния и системи за обучение.
Класът на самонастройващите се (екстремни) системи за автоматично управление е широко разпространен поради сравнително простата си техническа реализация. Този клас системи се дължи на факта, че редица обекти на управление или технологични процеси имат екстремни зависимости (минимални или максимални) на работния параметър от управляващите въздействия. Те включват мощни постояннотокови двигатели, технологични процесив химическата промишленост, Различни видовепещи, самолетни реактивни двигатели и др. Нека разгледаме процесите, протичащи в пещта по време на изгаряне на гориво. При недостатъчно подаване на въздух горивото в горивната камера не изгаря напълно и количеството генерирана топлина намалява. Когато има излишък на въздух, част от топлината се отвежда заедно с въздуха. И само при определено съотношение между количество въздух и топлина се постига максимална температура в горивната камера. В самолетен турбореактивен двигател чрез промяна на разхода на гориво е възможно да се постигне максимално налягане на въздуха зад компресора и следователно максимална тяга на двигателя. При нисък и висок разход на гориво налягането на въздуха зад компресора и тягата пада. Освен това трябва да се отбележи, че крайните точки на контролните обекти „плават“ във времето и пространството.
В общия случай можем да твърдим, че има екстремум, но при какви стойности на управляващото действие се постига, е предварително неизвестно. При тези условия системата за автоматично управление по време на работа трябва да генерира управляващо действие, което довежда обекта до екстремна позиция и да го поддържа в това състояние при условия на смущения и „плаващ“ характер на екстремни точки. Устройството за управление е екстремен регулатор.
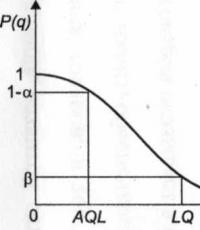
Според метода за получаване на информация за текущото състояние на даден обект екстремните системи са нетърсени и търсещи. В не-търсачки най-доброто управлениесе определя чрез използване на аналитични зависимости между желаната стойност на работния параметър и параметрите на регулатора. В търсачките, които са бавни, намирането на екстремума може да стане по различни начини. Най-широко използваният метод е синхронното детектиране, което се свежда до оценка на производната dy/du, където y е управляваният (работещ) параметър на обекта на управление, u е управляващото действие. Блокова диаграма, илюстрираща метода за синхронно откриване, е показана на фиг. 6.1.
Ориз. 6.1 Структура на синхронното детектиране
На входа на обекта на управление, който има екстремна зависимост y(u), заедно с контролното действие U. На изхода на управляващия обект получаваме y = y(u + gsinwt). Получената y стойност се умножава по сигнала f(t). В резултат на това сигнал А ще приеме стойността
A =yf(t) = y(u+gsinwt)gsinwt.
Ако приемем, че зависимостта y(u) е достатъчно гладка функция, тя може да бъде разширена в степенен ред и с достатъчна степен на точност е ограничена до първите членове на разширението
Y(u+gsinwt)=y(u)+gsinwt(dy/du) + 0,5g 2 sin 2 wt(d 2 y/du 2) + ….. .
Тъй като стойността на g е малка, можем да пренебрегнем членовете от по-висок ред и в резултат получаваме
Y(u + gsinwt) » y(u) + gsinwt(dy/du).
След това в резултат на умножението сигнал А ще приеме стойността
A = y(u)sinwt + g 2 sin 2 wt(dy/du).
На изхода на нискочестотния филтър Ф получаваме сигнал В
 .
.
Ако времевата константа на филтъра Tе достатъчно голям, получаваме

 .
.
Следователно сигнал B на изхода на филтъра е пропорционален на производната dy/du
1. С настоящото аз (Клиентът) изразявам съгласието си за обработка на личните ми данни, получени от мен при подаване на заявление за информационно-консултантски услуги/прием в образователни програми.
2. Потвърждавам, че предоставеният от мен номер е мобилен телефон, е моят личен телефонен номер, зададен ми от оператора клетъчна комуникация, и съм готов да нося отговорност за негативните последици, причинени от посочването на номер на мобилен телефон, принадлежащ на друго лице.
Групата от компании включва:
1. LLC "MBSH", съдебен адрес: 119334, Москва, Ленински проспект, 38 А.
2. ANO DPO "МОСКОВСКА БИЗНЕС ШКОЛА", юридически адрес: 119334, Москва, Ленински проспект, 38 А.
3. За целите на това споразумение „лични данни“ означава:
Лични данни, които Клиентът предоставя за себе си съзнателно и самостоятелно при попълване на Заявка за обучение/получаване на информационни и консултантски услуги на страниците на уебсайта на Групата компании
(а именно: фамилия, собствено име, бащино име (ако има такова), година на раждане, ниво на образование на Клиента, избрана програма за обучение, град на пребиваване, номер на мобилен телефон, адрес електронна поща).
4. Клиент - физическо лице (лице, което е законен представител индивидуален, под 18-годишна възраст, в съответствие със законодателството на Руската федерация), които са попълнили Заявление за обучение/за получаване на информационни и консултантски услуги на уебсайта на Групата компании, като по този начин са изразили намерението си да използват образователната/ информационни и консултантски услуги на групата компании.
5. Групата компании по принцип не проверява точността на личните данни, предоставени от Клиента и не упражнява контрол върху неговата правоспособност. Въпреки това Групата от компании приема, че Клиентът предоставя надеждни и достатъчни лична информацияпо въпроси, предложени във формуляра за регистрация (формуляр за кандидатстване), и поддържа тази информация актуална.
6. Групата дружества събира и съхранява само онези лични данни, които са необходими за провеждане на прием за обучение/получаване на информационни и консултантски услуги от Групата дружества и организиране на предоставянето на образователни/информационни и консултантски услуги (изпълнение на споразумения и договори с клиентът).
7. Събраната информация ви позволява да изпращате информация под формата на имейли и SMS съобщения чрез комуникационни канали (SMS мейлинг) на посочения от Клиента имейл адрес и номер на мобилен телефон с цел провеждане на прием за предоставяне на услуги от групата компании към организацията учебен процес, изпращане на важни известия като промени в правилата, условията и политиките на Групата от компании. Също така, такава информация е необходима за своевременно информиране на Клиента за всички промени в условията за предоставяне на информационни и консултантски услуги и организацията на процеса на приемане на образование и обучение в Групата от компании, информиране на Клиента за предстоящи промоции, предстоящи събития и други събития на Групата от дружества, чрез изпращане на пощенски и информационни съобщения до него, както и с цел идентифициране на страна по споразумения и договори с Групата от дружества, комуникация с Клиента, включително изпращане на уведомления, искания и информация относно предоставяне на услуги, както и обработка на заявки и заявки от Клиента.
8. При работа с личните данни на Клиента Групата от компании се ръководи от Федерален закон RF № 152-FZ от 27 юли 2006 г „Относно личните данни“.
9. Информиран съм, че мога да се отпиша от получаване на информация по имейл по всяко време, като изпратя имейл на: . Можете също така да се отпишете от получаване на информация по имейл по всяко време, като щракнете върху връзката „Отписване“ в долната част на писмото.
10. Информиран съм, че по всяко време мога да откажа получаването на SMS бюлетини на посочения от мен мобилен телефонен номер, като изпратя имейл на следния адрес:
11. Групата от компании предприема необходимите и достатъчни организационни и технически мерки за защита на личните данни на Клиента от неоторизиран или случаен достъп, унищожаване, промяна, блокиране, копиране, разпространение, както и от други неправомерни действия на трети лица.
12. Това споразумение и отношенията между Клиента и Групата от компании, възникващи във връзка с прилагането на споразумението, са предмет на законодателството на Руската федерация.
13. С настоящото споразумение потвърждавам, че съм навършил 18 години и приемам условията, посочени в текста на настоящото споразумение, както и давам пълното си доброволно съгласие за обработка на личните ми данни.
14. Това споразумение, уреждащо отношенията между Клиента и Групата от компании, е валидно през целия период на предоставяне на Услугите и достъпа на Клиента до персонализираните услуги на уебсайта на Групата от компании.
LLC "MBSH" юридически адрес: 119334, Москва, Leninsky Prospekt, 38 A.
MBSH Consulting LLC юридически адрес: 119331, Москва, авеню Вернадски, 29, офис 520.
ЧУДПО "МОСКОВСКА БИЗНЕС ШКОЛА - СЕМИНАРИ", юридически адрес: 119334, Москва, Ленински проспект, 38 А.
Обхватът на XPM не се ограничава до разработка на софтуер. Екстремното управление на проекти ще бъде ефективно за опитни екипи, които изпълняват иновативни проекти, стартиращи фирми и работят в хаотични, непредвидими условия.
Какво е екстремно управление на проекти?
Концепцията XPM е разработена през 2004 г. Но би било несправедливо да го считаме за единствения разработчик. Дъг е вдъхновен от редица техники на други автори:
- модел на радикално управление на проекти Роб Томсет,
- APM Джим Хайсмит,
- концепцията за екстремно програмиране Кента Бек.
DeCarlo основа Extreme Project Management теория на хаосаИ сложни адаптивни системи.
Теорията на хаоса е математическа област, посветена на описанието и изследването на поведението на нелинейни динамични системи, които при определени условия са обект на така наречения динамичен хаос.
Сложната адаптивна система е система от много взаимодействащи компоненти, която отговаря на редица условия (фрактална структура, способност за адаптивна дейност и др.). Примерите за CAS включват град, екосистеми и фондовия пазар.
Дъг сравнява екстремното управление на проекти с джаза.
Въпреки че джазът може да звучи хаотично, той има своя собствена структура, благодарение на която музикантите имат възможност да импровизират и да създават истински шедьоври.
Вместо да следват утъпкания път, в Extreme Project Management ръководителите на проекти обсъждат най-добрата алтернатива с клиента, експериментират, изучават резултатите и използват това знание в следващия проектен цикъл.
Едно от свойствата на някои хаотични системи е
които са обект на разглеждане на теорията на хаоса - "ефектът на пеперудата",
стана популярен след "Шум от гръм" на Рей Бредбъри
Брайън Уорнам, автор на книгата, очерта пет стъпки, които екипът за екстремно управление на проекти трябва да следва, за да завърши успешно проект:
- Вижте— ясно дефинирайте визията на проекта, преди да започнете екстремно управление на проекта
- Създавайте- ангажиране на екипа в творчески мисловни процеси и мозъчна атака за генериране и подбор на идеи за постигане на установената визия на проекта
- Актуализация— насърчаване на екипа да тества своите идеи чрез внедряване на иновативни решения
- Надценявайте— когато цикълът на разработка наближава края си, екипът трябва да преоцени работата си
- Разпределете- След завършване на обучението е важно да разпространите знанията и да ги приложите към бъдещи етапи на проекта, както и към нови проекти като цяло.
Тъй като хората са в челните редици на екстремното управление на проекти, това също определя спецификата на измерване на успеха на XPM проект:
- потребителите са доволни от напредъка и междинните доставки - има усещане, че проектът се движи в правилната посока, въпреки заобикалящата нестабилност.
- потребителите са доволни от крайната доставка.
- членовете на екипа са доволни от качеството на живота си, докато работят по проекта. Ако ги попитате дали биха искали да работят по подобен проект, повечето ще отговорят положително.
Плюсове и минуси на XPM
Сред основните предимства на методологията трябва да се отбележи следното:
- интегритет- Въпреки че Extreme Project Management включва различни методи, инструменти и шаблони, те имат смисъл само когато се прилагат към целия проект като цяло. Като ръководител на проекта можете да видите целия проект като единна системабез да е необходимо да се анализират отделните му части
- ориентирани към хората— в XPM акцентът е върху динамиката на проекта. Тя позволява на заинтересованите страни да си взаимодействат и да комуникират и в крайна сметка да отговарят на нуждите на клиентите
- бизнес фокус- след като резултатът бъде постигнат, вие ще имате ясна визия как проектът може да бъде от полза за вашия клиент. Екипът е постоянно фокусиран върху доставянето на продукта навреме и често
- хуманизъм- един от принципите на Extreme Project Management. Състои се от отчитане на качеството на живот на хората, участващи в проекта. Тъй като са неразделна част от проекта, страстта към работата и корпоративният дух влияят значително на бизнеса, така че физическото и морално състояние на екипа е важно по време на работа по проекта
- реалността като основа— екстремното управление на проекти ви позволява да работите в непредсказуема, хаотична среда. Не можете да промените реалността, за да приспособите проект. Случва се обратното: адаптирате проекта към външни фактори.
Имаше и някои недостатъци. Те включват:
- несигурност— тази функция отрязва голям сектор от проекти, като се започне от тези с критична опасност (военни съоръжения, Атомни станции, приложения за интернет банкиране и др.), завършващи с тръжни проекти със строго определен бюджет, срокове и други свойства на проекта;
- високи изисквания към опита и квалификацията на екипа по проекта— необходимо е постоянно да се адаптира към промените в проектната среда, да се установи ефективна комуникация помежду си, заинтересованите страни и ръководителя на проекта и да се работи на кратки итерации (последното е от значение за ИТ сферата);
- необходимост от промяна на начина на мислене— за разлика от традиционното управление на проекти, при което работата по проекта протича по обичайните етапи, съгласно одобрения план и роли, при XPM екипът трябва да се преструктурира и да бъде подготвен за невъзможността за пълен контрол над проекта;
- невъзможност за дългосрочно планиране— вчерашният план няма да е толкова уместен, колкото новините от миналия месец. За да може екипът да работи правилно за постигане на целта на проекта, е необходимо да демонстрира качествата на гъвкавост и самоорганизация.

- проектът се създава в динамична среда— има постоянна промяна на обстоятелствата, скоростта, изискванията;
- възможна употреба проба и грешкапо време на работа по проект;
- По проекта работи опитен екип— за разлика от традиционното управление на проекти, хората, а не процесите, са на преден план;
- разработват приложение- отзад жизнен цикълразвитие софтуерв повечето случаи успява да промени функционалността или да разшири списъка с налични платформи. Колкото повече потребители използват софтуера, толкова повече промени могат да бъдат направени, за което екстремното управление на проекти е чудесно.
- това е мета проект— което е разделено на много малки проекти. XPM в този случай ще ви помогне да се справите със забавянето при започване на работа;
- собственикът на бизнеса е готов да участва в проекта от началото до края. Комуникациите трябва да бъдат установени "ръководител на проекти - бизнесмен"
« Ръководител проект- заинтересована страна"
"мениджър на проекта - собственик на бизнес - заинтересована страна."
Заинтересованите страни са хора и организации, които влияят върху проекта по един или друг начин. Това включва активно участващите в него (екип на проекта, спонсор), и тези, които ще използват резултатите от проекта (клиент), и хората, които могат да повлияят на проекта, въпреки че не участват в него (акционери, партньорски компании).
Екстремното управление на проекти изисква бърза адаптация на екипа към необичайните, постоянно променящи се условия, в които трябва да работи. Ето защо има няколко основни правила, които са задължителни за ефективното използване на Extreme Project Management:
Пример за разликата класическиуправление на проекти от екстремни. В първия се постига планираният резултат, във втория - желаният резултат.
Екстремно управление на проекти:
Използване на лидерство, принципи и инструменти за осигуряване на стойност в лицето на нестабилността Дъг ДеКарло
№1 за всеки, който иска да овладее екстремното управление на проекти. Въз основа на опит с повече от 250 проектни екипиавторът е написал подробно ръководство за екстремно управление на проекти. Ръководители на проекти на най-големите международни организации: Management Solutions Group, Inc., Zero Boundary Inc., Guru Unlimited и др.
Ефективно управление на проекти: Традиционно, Адаптивно, Екстремно,
Трето издание Робърт К. Висоцки
След като прочетете това, можете да придобиете представа не само за екстремно управление на проекти, но и за адаптивно. Едно интересно нещо е, че в края на всяка глава са дадени въпроси за организиране на представения материал, който е пълен с реални случаи на проекти от различни области.
Радикално управление на проекти Роб Томсет
Екстремното управление на проекти е представено от „А” до „Я”, анализирани са всеки инструмент и техника, с които се прилага Екстремното управление на проекти. Максимум практическа информацияс анализ на случая.
Архитектурни практики: Екстремно управление на проекти за архитекти
Не книга, а, но е невъзможно да не я включим в селекцията заради нейната уникалност. Това е изчерпателен ресурс за използването на XPM в архитектурата и строителството. За съжаление, авторът на сайта вече не го актуализира, но страницата все още е подходяща като измамник.
Присъда
изкуството и науката за улесняване и управление на потока от мисли, емоции и действия по начин, който произвежда максимални резултати в сложни и нестабилни среди.
Причините за успеха на XPM сред другите техники за управление се крият в три области:
- Extreme Project Management прави това възможно непрекъсната самокорекция и самоусъвършенстванев реално време;
- XPM се фокусира върху определяне и следване на мисията на проекта, вдъхване на доверие на заинтересованите страни и екипа на проекта;
- ориентирани към хората, хуманизъм и приоритет на хората пред процесите като Основни функцииметодология.